Понадобилось на работе контролировать обороты двигателя. Решили использовать датчик Холла. На муфту установленную на валу двигателя приклеили пару неодимовых магнитов. Для датчика Холла сделали схему на компараторе, чтобы фиксировать моменты прохождения магнита напротив датчика. Схема приведена на рис.1
Рис. 1 Принципиальная схема тахометра
Описание работы
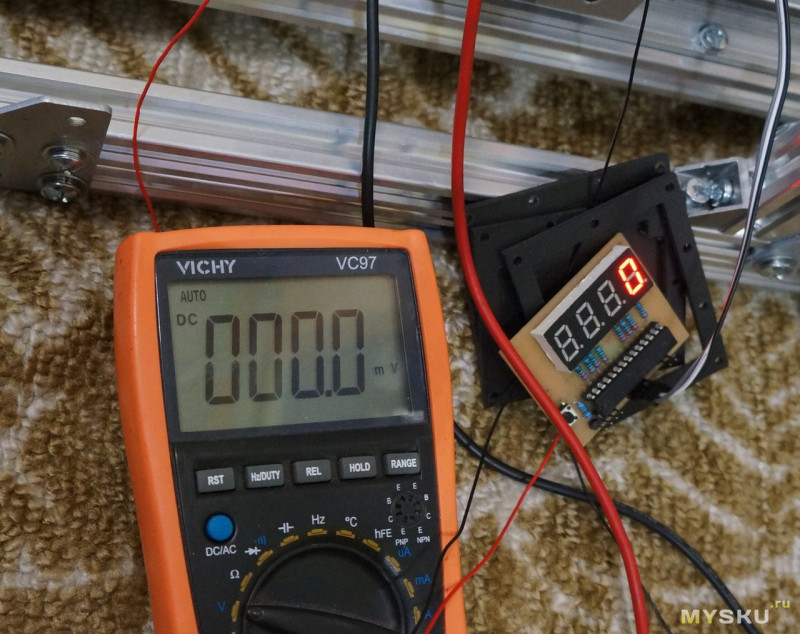
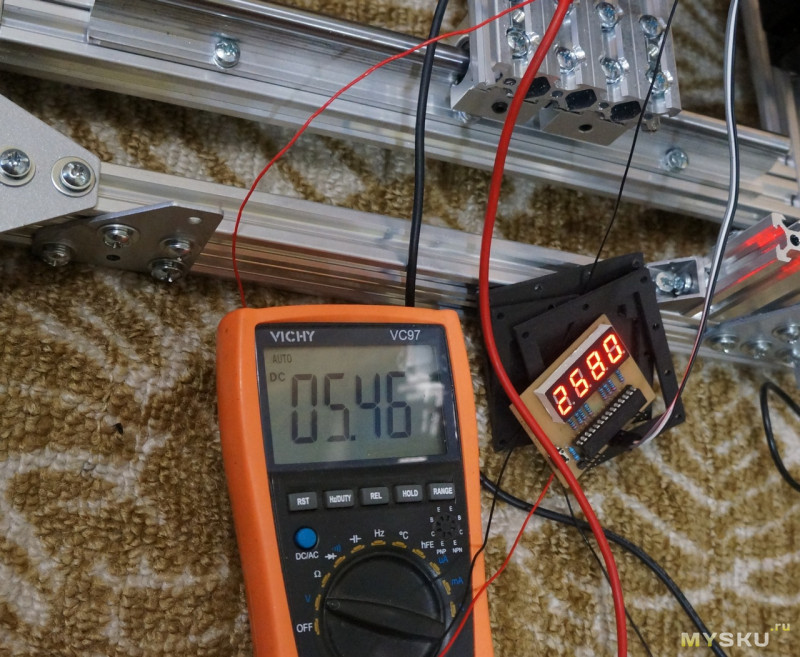
Датчик Холла AHSS49 на каждый проход магнита, закрепленного на валу двигателя формирует импульс амплитудой около 1 вольта, со смещением относительно земляной шины на +2,5 В.
Полученный сигнал поступает на вход компаратора IC1 LM311, который формирует управляющие импульсы для выходной опто-развязки OC1 PC817, выход которой присоединяется ко входу контроллера, подтянутому через сопротивление 1-2 кОм к питанию контроллера. В промышленных контроллерах, такие резисторы предустановлены и требуется только конфигурирование входных цепей. Порог срабатывания компаратора IC1 настроен на напряжение 2,6 В. Настраивая компаратор на более высокое напряжение можно получить более узкие импульсы на выходе – это связано с тем, что импульсы на выходе датчика Холла имеют форму близкую к треугольной.
Конденсаторы С1, С2 предназначены для снижения импульсных помех и исключения ложных срабатываний компаратора.
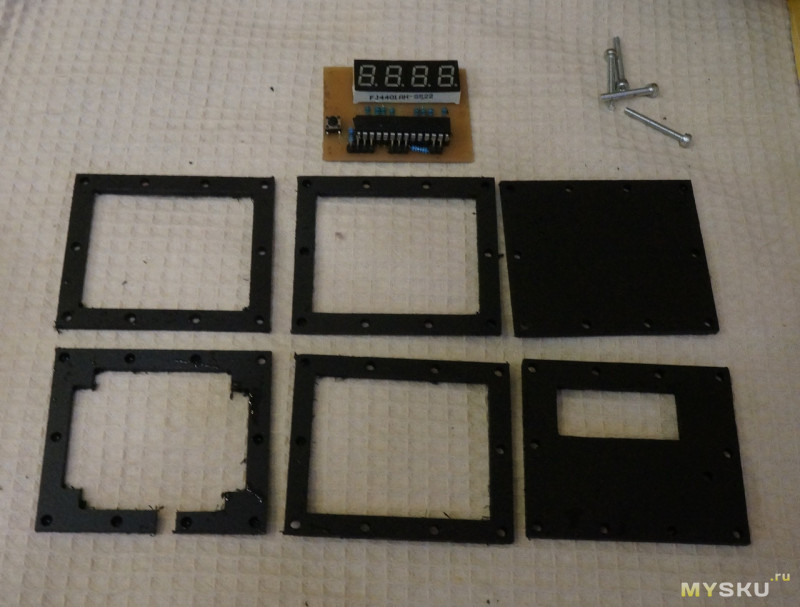
Схема была смакетирована на самодельной монтажной плате см. рис.2 Для публикации была подготовлена разводка печатной платы см. Приложения к статье.
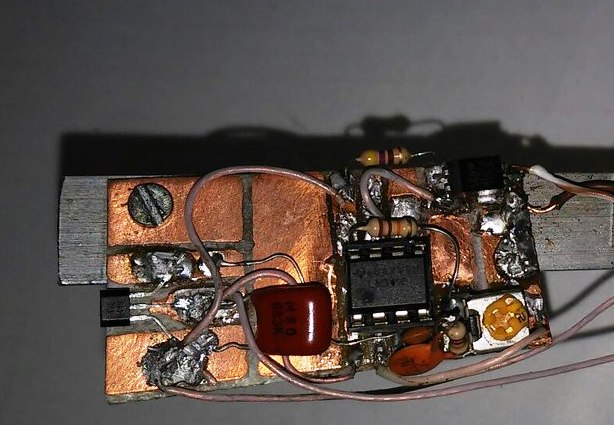
Рис.2 Макет схемы усиления сигнала датчика Холла
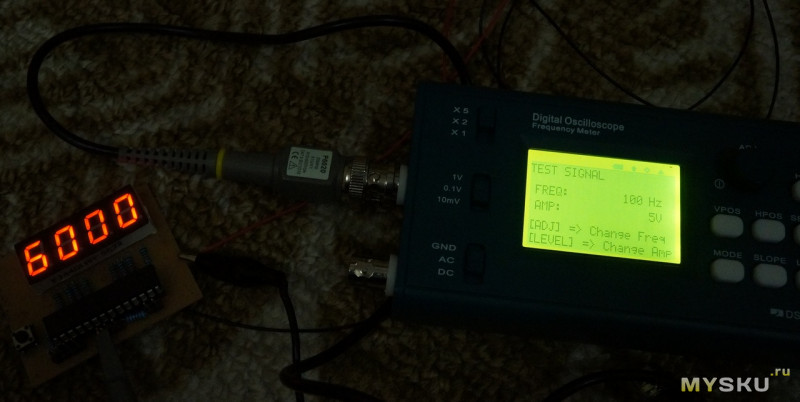
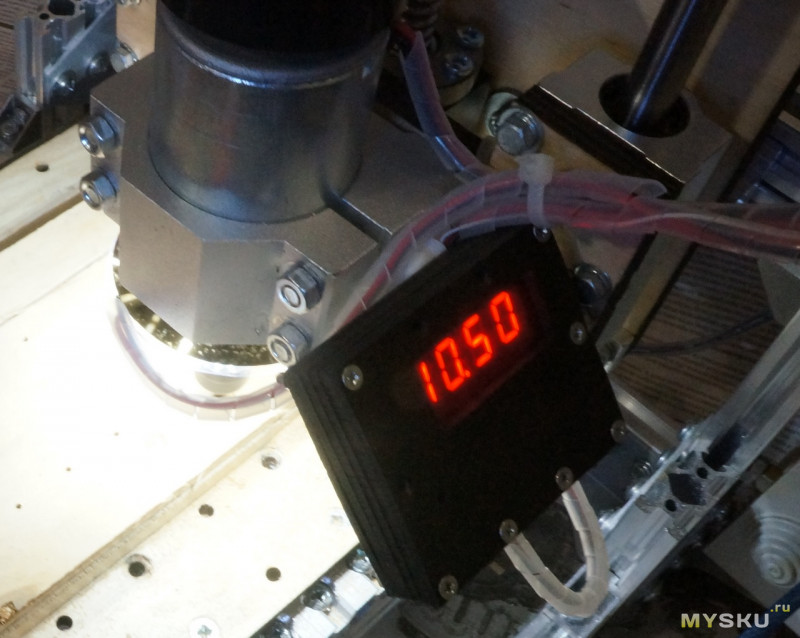
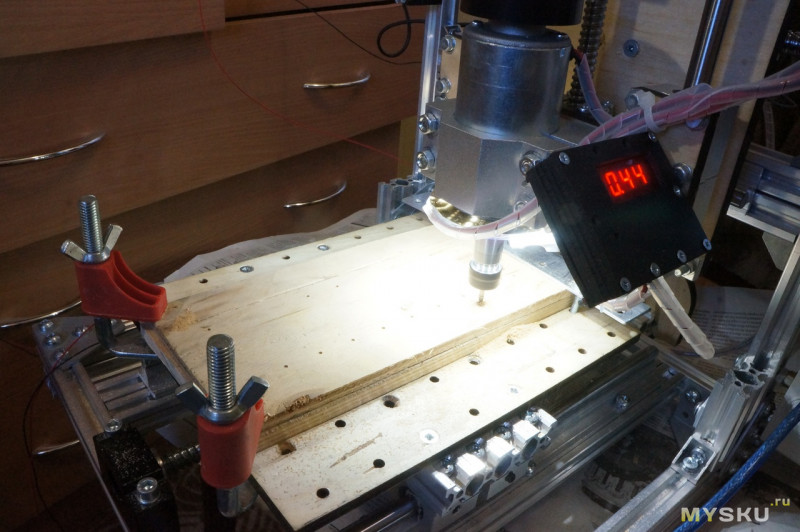
Установка датчика около муфты вала двигателя см.рис.3 Датчик Холла был установлен таким образом, чтоб при прохождении магнитов установленных на муфте они оказывались на расстоянии пимерно 5 мм напротив датчика Холла. При установке на валу двух магнитов результирующая частота на выходе платы удваивается. При установке 4 магнитов возрастает в 4 раза. Большее число магнитов устанавливается для подсчета частоты вращения низко-оборотных двигателей. Соответственно, при измерении частоты вращения двигателя результат делится на число магнитов установленных на валу двигателя.

Рис.3 Установка датчика на кронштейне вблизи муфты на валу двигателя
Выход тахометра может быть организован несколькими способами в зависимости от решаемых задач
Схема приведенная на рис. 1 при работе с промышленными контроллерами может не дать устойчивого срабатывания на каждый импульс поскольку 2 p-n перехода опто-развязки PC817 при полном открытии будут давать падение напряжения около 1 В. И , в этом случае, дискретные входы пром.контроллера выполненные на КМОП микросхемах будут срабатывать неустойчиво, в этом случае имеет смысл реализовать схему выхода на полевом N-канальном транзисторе. Вариант схемы с выходом на полевом N-канальном транзисторе приведен на рис.4 . Для управления полевым транзистором пришлось задействовать дополнительный вход контроллера (клемма Х1). В случае если входов контроллера для этого не хватает, можно использовать дополнительный источник питания + 5В, подключив его к клемме Х1. Рабочий вход (клемма Х2) замыкается полевым транзистором и сформированные импульсы поступают на вход контроллера Х2.
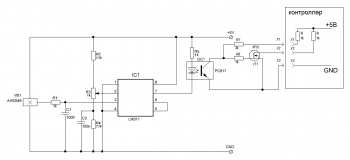
Рис.4 Вариант схемы с выходом на полевом N-канальном транзисторе с дополнительной гальванической развязкой
Если дополнительная гальваническая развязка выхода не нужна, можно использовать схему рис.5
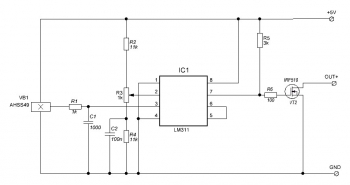
Рис.5 Вариант схемы с выходом на полевом N-канальном транзисторе без дополнительной опторазвязки

Рис. 6 Осциллограмма выходного сигнала для варианта схемы см. рис. 4

 |
Датчик вращения двигателя схема на транзисторах |

Электродвигатель подключается к самодельной конструкции строго с соблюдением полярности, через ограничительное сопротивление R1. При подаче питания на схему в точке соединения нижнего вывода двигателя и сопротивления R1 генерируются пульсации постоянного напряжения амплитудой от 0,3 до 0,6 В в зависимости от качества сборки и модели электродвигателя. Это пульсирующее, в момент включения двигателя напряжение имеет хаотичную форму. Разделительная емкость C1 отсекает постоянную составляющую напряжения, поэтому на базу биполярного транзистора поступает только переменная часть управляющего напряжения. При нормальной работе электродвигателя переменное напряжение в базе периодически немного открывает транзистор, не давая зарядится емкости C2 и открыться полевому транзистору. Неполярный конденсатор С2 кроме того еще и стабилизирует напряжение «исток — затвор» полевого транзистора, обеспечивая мягкое звучание сигнального капсюля HA1.
При остановке электродвигателя из-за обрыва внутренней цепи обмотки, попадание между лопастями любого инородного предмета и т.п, пульсации напряжения идущие на базу биполярного транзистора оканчиваются. Транзистор запирается, этому также помогает шунтирующее сопротивление R2). Полевой транзистор в этот самый момент, как раз открывается, так как получает управляющее напряжение через сопротивление R3. Как только напряжение на затворе полевого транзистора достигнет уровня трех вольт, он откроется и подсоединит через себя звуковой капсюль со встроенным генератором звуковой частоты.

Звуковой генератор обладает довольно громким звуком, который можно услышать на приличном расстоянии. Звуковая сигнализация орет до тех пор, пока схема не будет отключена или пока вновь не запустится электродвигатель. При замыкании контактов тумблера SB1 электродвигатель начинает работать в полную силу, при этом другая группа контактов разрывает цепь звукового генератора.
Конструкция в наладке и регулировке не нуждается и начинает работать сразу после подачи питания. При увеличении емкости C1 и номинала сопротивления R1 чувствительность увеличивается, а снизить ее можно уменьшением значения сопротивления R2.
|



|