

ДСР-60
Двигатель синхронный редукторный ДСР-60 малой мощности для использования в системах автоматики, радиоэлектроники и телемеханики для привода с постоянной скоростью вращения различных механизмов.
Двигатель ДСР-60 – гистерезисный трехфазный со встроенным редуктором.
Для включения двигателей в однофазную сеть в качестве фазосдвигающего элемента используется конденсатор емкостью 1 мкФ на рабочее напряжение не менее 300 В.
Крепление двигателей – фланцевое.
Режим работы – продолжительный.
Технические характеристики двигателя ДСР-60:
• Число фаз . 3/1
• Напряжение питания, В . 220
• Частота питающей сети, Гц . 50
• Частота вращения, об/мин . 60
• Номинальный вращающий момент, Н*см . 1,5/1,0
• Потребляемый ток, А . 0,08
• Масса, кг . 0,7
Условия эксплуатации двигателя ДСР-60:
• Вибрационные нагрузки:
– диапазон частот, Гц . 1-300
– ускорение, м/с2 . 50
• Ударные нагрузки, м/с2 . 150
• Температура окружающей среды, °С . -60 +70
• Относительная влажность воздуха при температуре 40°С, % . 98
• Гарантийная наработка, ч . 10000
13.1. ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Электрические исполнительные механизмы подразделяются на однооборотные и многооборотные. В однооборотных исполнительных механизмах выходной вал может перемещаться только в пределах одного неполного оборота. Максимальный угол поворота вала определяется конструкцией исполнительного механизма и положением конечных выключателей. В многооборотных электрических исполнительных механизмах выходной вал вращается в течение неограниченного времени при подаче на электродвигатель напряжения питания.
ОДНООБОРОТНЫЕ ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Исполнительный механизм ИМТМ–40/2,5-83. Общий вид, габаритные и присоединительные размеры исполнительного механизма представлены на рис. 13.1.
Редуктор i является основным узлом, к которому присоединяются все остальные узлы, входящие в механизм. Он состоит из литого корпуса с размещенными в нем червяком, червячным колесом и фрикционным тормозом 5. Смазка редуктора (червячная
и цилиндрическая зубчатые передачи, под-щипники) – ЦИАТИМ-203.
Фрикционный тормоз служит для ограничения выбега выходного вала механизма. Тормозной момент зависит от силы давления пружины на тормозной диск, соприкасающийся с фрикционным кольцом, приклеенным к корпусу. Тормозной диск связан с червяком; при этом имеется возможность его перемещения вдоль оси червяка.
Ручное управление механизмом осуществляется путем сочленения съемной ручки с концом вала червяка.
Узел микровыключателей 4 состоит из двух кулачков и двух микропереключателей и предназначен для ограничения диапазона рабочего хода выходного вала механизма.
Конечные выклю.чатели срабатывают при нажатии соответствующих кулачков, поворачивающихся вместе с выходным валом механизма, на буферные пластины, соединенные с приводными элементами микропереключателей. Угол поворота вала исполнительного механизма зависит от положения кулачков на выходном валу. Фиксация положения кулачков осуществляется затяжкой гайки.
В механизме применен серийно выпускаемый электродвигатель 4АА56В4УЗ выходной мощностью 180 Вт.
Механизм изготавливается для работы

Рис. 13.1. Общий вид, габаритные и присоединительные размеры механизмов ИМТМ-40/2,5-83: / – электродвигатель; 2 – штуцерный ввод; 5 -редуктор; 4 – узел микровыключателей; 5 – фракционный тормоз; 6 – коробка зажимов

Рис. 13.2. Электрическая схема внешних соединений Исполнительного механизма с пускателем типа ПМЕ: Af-электродвигатель; /f-колодка электродвигателя; ЛГ-колодка зажимов; 5,, 2 – микропереключатели; Р,
в повторно-кратковременном реверсивном режиме с числом включений до 60 в час с ПВ до 15% при нагрузке на выходном валу от номинальной противодействующей до номинальной сопутствующей.
Механизм допускает непрерывную работу длительностью до 10 мин с чередованием номинальной противодействующей и сопутствующей нагрузок на выходном валу.
Механизм допускает установку при любом пространственном расположении выходного вала. Крепление механизма производится четырьмя болтами М8.
Исполнительный механизм применяется в комплекте с магнитным пускателем типа ПМЕ. Электрическая схема внешних соеди-
нений ИМ с пускателем ПМЕ приведена на рис. 13.2.
Электрическое подключение механизма производят через штуцерный ввод и сальниковое устройство электродвигателя согласно схеме соединений. Место подсоединения заземляющего проводника должно быть тщательно защищено и предохранено после присоединения заземляющего проводника от коррозии путем нанесения слоя консистентной смазки. .Сопротивление заземляющего устройства должно быть не менее 20 МОм.
Исполнительные механизмы МЭО с электродвигателями серии ДРС. Общий вид, габаритные и присоединительные размеры ИМ представлены на рис. 13.3.
Механизм имеет следующие модификации; МЭО-16/10-0,25-82; МЭО-16/63-0,25-82;
МЭО-16/25-0,63-82 МЭО-40/25-0,25-82 МЭО-40/63-0,63-82
МЭО-16/160-0,63-82; МЭО-40/63-0,25-82; МЭО-30/160-0,63-82. Условное обозначение модификации ИМ содержит данные о его крутящем моменте, времени полного хода выходного вала, угле поворота выходного вала. Кроме указанного, в модификации в конце шифра дается буква Р для механизмов с реостатным датчиком БДР-П или буква И для механизма с индукционным датчиком БДИ-6.
Например, механизм модификации МЭО-16/25-0,63-82Р имеет крутящий момент 16 Нм, время полного хода выходного вала 25 с, номинальный ход (угол поворота) вала 0,63 оборота и реостатный датчик.


Рис. 13.3. Общий вид, габаритные и присоединительные размеры исполнительного механизма МЭО с электродвигателем ДСР: I
рычаг; 2 – болт заземления; 3 – датчяк; 4 – панель; 5 – ручной привод; 6 – редуктор; 7 – штепсельный разъем; 8 – электродвигатель; 9 – зубчатая пара; 10 – червячная пара
Механизм применяется при повторно-кратковременном реверсивном режиме работы с ПВ до 25% при номинальном моменте с числом включений до 300 в час.
Движие от электродвигателя передается на выходной вал механизма через зубчатую и червячную передачи.
Разные модификации механизмов по скорости получаются сменой электродвигателя и изменением передаточного числа цилиндрической зубчатой пары.
Ручное управление механизмом осуществляется с помощью ручного привода 5.
Привод к блоку датчиков осуществляется непосредственно от выходного вала.
Принципиальная электрическая схема ИМ представлена на рис. 13.4. Блок индукционных датчиков БДИ-6 состоит из четырех индукционных датчиков (рис. 13.4, а), четырех кулачков и четырех микровыключателей, качающегося рычага и валика.
Все элементы укреплены на корпусе блока датчиков.
При повороте выходного вала механизма профильный кулачок действует на качающийся рычаг, который, в свою очередь, действует на сердечники индуктивных датчиков.
Профильный кулачок выполнен по спирали Архимеда в диапазонах 0-90° и 0-240°.
Все кулачки могут устанавливаться в любом положении независимо один от другого.
Блок реостатных датчиков БДР-П отличается от блока БДИ-6 только тем, что вместо индукционных датчиков имеет два реостата (рис. 13.4, б) с токосъемниками и контактными кольцами.
На рис. 13.4,0 представлена принци-пиальцая электрическая, схема ИМ с датчиком БДИ-6 и электродвигателем ДСР-1/10-0,7. Бели исполнительный механизм имеет электродвигатель модификаций ДСР-4/60 или ДСР-10/60, то электродвигатель подключается по схеме рис. 13.4, е. Реостатный датчик БДР-П подключается по схеме рис. 13.4,6. В ИМ с БДР-П .электродвигатель подключается так же, как и в ИМ с БДИ-6, по схеме иа рис. 13.4, а или е.

Рис. 13.4. Принципиальные электрические схемы исполнительною механизма МЭО: а -с датчиком БДИ-6 и электродвигателем типа flCP-1/lO-0,7; б -схема подключения Датчика БДР-П; в – схема подключения электродвигателя ДСР-4/60 или ДСР-10/60; М> электродвигатель; X -вилка РП10-30; 5,- – микропереключатели; Л – панель
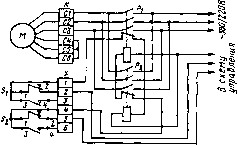
Рис. 13.2. Электрическая схема внешних соединений Исполнительного механизма с пускателем типа ПМЕ: Af-электродвигатель; /f-колодка электродвигателя; ЛГ-колодка зажимов; 5,, 2 – микропереключатели; Р,
в повторно-кратковременном реверсивном режиме с числом включений до 60 в час с ПВ до 15% при нагрузке на выходном валу от номинальной противодействующей до номинальной сопутствующей.
Механизм допускает непрерывную работу длительностью до 10 мин с чередованием номинальной противодействующей и сопутствующей нагрузок на выходном валу.
Механизм допускает установку при любом пространственном расположении выходного вала. Крепление механизма производится четырьмя болтами М8.
Исполнительный механизм применяется в комплекте с магнитным пускателем типа ПМЕ. Электрическая схема внешних соеди-
нений ИМ с пускателем ПМЕ приведена на рис. 13.2.
Электрическое подключение механизма производят через штуцерный ввод и сальниковое устройство электродвигателя согласно схеме соединений. Место подсоединения заземляющего проводника должно быть тщательно защищено и предохранено после присоединения заземляющего проводника от коррозии путем нанесения слоя консистентной смазки. .Сопротивление заземляющего устройства должно быть не менее 20 МОм.
Исполнительные механизмы МЭО с электродвигателями серии ДРС. Общий вид, габаритные и присоединительные размеры ИМ представлены на рис. 13.3.
Механизм имеет следующие модификации: МЭО-16/10-0,25-82; МЭО-16/63-0,25-82;
МЭО-16/25-0,63-82 МЭО-40/25-0,25-82 МЭО-40/63-0,63-82
МЭО-16/160-0,63-82; МЭО-40/бЗ-0,25-82; МЭО-30/160-0,63-82. Условное обозначение модификации ИМ содержит данные о его крутящем моменте, времени полного хода выходного вала, угле поворота выходного вала. Кроме указанного, в модификации в конце шифра дается буква Р для механизмов с реостатным датчиком БДР-П или буква И для механизма с индукционным датчиком БДИ-6.
Например, механизм модификации МЭО-16/25-0,63-82Р имеет крутящий момент 16 Нм, время полного хода выходного вала 25 с, номинальный ход (угол поворота) вала 0,63 оборота и реостатный датчик.
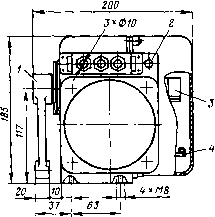
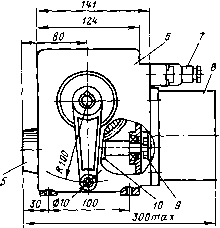
Рис. 13.3. Общий вид, габаритные и присоединительные размеры исполнительного механизма МЭО с электродвигателем ДСР: I — рычаг; 2 — болт заземления; 3 — датчяк; 4 — панель; 5 — ручной привод; б — редуктор; 7 — штепсельный разъем; 8 — электродвигатель; 9 — зубчатая пара; 10 — червячная пара
Механизм применяется при повторно-кратковременном реверсивном режиме работы с ПВ до 25% при номинальном моменте с числом включений до 300 в час.
Движ ие от электродвигателя передается на выходной вал механизма через зубчатую и червячную передачи.
Разные модификации механизмов по скорости получаются сменой электродвигателя и изменением передаточного числа цилиндрической зубчатой пары.
Ручное управление механизмом осуществляется с помощью ручного привода 5.
Привод к блоку датчиков осуществляется непосредственно от выходного вала.
Принципиальная электрическая схема ИМ представлена на рис. 13.4. Блок индукционных датчиков БДИ-6 состоит из четырех индукционных датчиков (рис. 13.4, а), четырех кулачков и четырех микровыключателей, качающегося рычага и валика.
Все элементы укреплены на корпусе блока датчиков.
При повороте выходного вала механизма профильный кулачок действует на качающийся рычаг, который, в свою очередь, действует на сердечники индуктивных датчиков.
Профильный кулачок выполнен по спирали Архимеда в диапазонах 0 — 90° и 0-240°.
Все кулачки могут устанавливаться в любом положении независимо один от другого.
Блок реостатных датчиков БДР-П отличается от блока БДИ-6 только тем, что вместо индукционных датчиков имеет два реостата (рис. 13-4, б) с токосъемниками и контактными кольцами.
На рис. 13.4, а представлена принципиальная электрическая, схема ИМ с датчиком БДИ-6 и электродвигателем ДСР-1/10-0,7. Бели исполнительный механизм имеет электродвигатель модификаций ДСР-4/60 или ДСР-10/60, то электродвигатель подключается по схеме рис. 13.4, е. Реостатный датчик БДР-П подключается по схеме рис. 13.4,6. В ИМ с БДР-П,■электродвигатель подключается так же, как и в ИМ с БДИ-6, по схеме иа рис. 13.4, а или е.
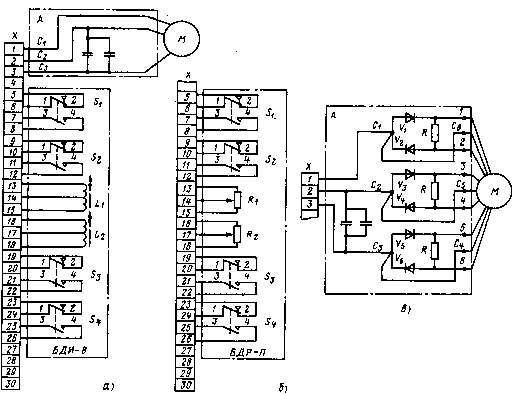
Рис. 13.4. Принципиальные электрические схемы исполнительною механизма МЭО: а-с датчиком БДИ-6 и электродвигателем типа ДСР-1/10-0,7; б-схема подключения Датчика БДР-П; в – схема подключения электродвигателя ДСР4/60 или ДСР-10/60; М -г электродвигатель; X-вилка РП10-30; 5,- 4 – микропереключатели; Л – паИель
При подаче напряжения питания к зажимам 1, 2 вал механизма вращается в одну сторону, при подаче напряжения питания к зажимам 1, 3 —в обратную сторону.
Электрические микровыключатели, установленные в блоке сигнализации положения, служат для ограничения перемещения Выходного вала, а также для блокировки и сигнат лизации.
Для подключения внешних электрических цепей в механизме применен разъем типа РП-10-30.
Профиль кулачка микровыключателя позволяет удерживать микровыключатель во включенном (выключенном) состоянии при дальнейшем повороте кулачка на 90° после срабатывания микровыключателя.
Сочленение механизмов с регулирующим органом может осуществляться как Непосредственно к выходному валу, так и через тягу, соединенную с рычагом.
Внешние электрические соединения механизмов осуществляются с помощью медных проводов сечением не более 1 мм через штепсельный разъем.
Исполнительные механизмы МЭО с электродвигателями серии ДАУ. Общий вид, габаритные и установочные размеры механизма представлены на рис. 13.5. Механизм состоит из редуктора, электродвигателя, блока датчиков, блока конденсаторов и электромагнитного тормоза.
Механизмы имеют следующие модифи-
кации: МЭО-40/10-0,25; МЭО-100/10-0,25 МЭО-100/25-0,25 МЭО-250/25-0,25 МЭО-250/63-0,25 Цифры в шифре модификации соответственно обозначают: номинальный крутящий момент на выходном валу (Н • м), номинальное
МЭО-40/25-0,83 МЭО-100/25-0,83 МЭО-100/63-0,83 МЭО-250/63-0,83 МЭО-250/180-0,63.
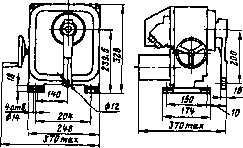
Рис. 13.5: Общий вид, габаритные и установочные размеры МЭО с электродвигателем ДАУ
время полного хода выходного вала (с), номинальный полный ход выходного вала (0,25 или 0,63 оборота).
Механизмы изготовляются для работы в повторно-кратковременном реверсивном режиме с числом включений до 320 в час и ПВ до 25% при нагрузке на выходном валу от номинальной противодействующей до 0,5 номинального значения сопутствующей. При этом механизмы допускают работу в течение 1 ч в повторно-кратковременном реверсивном режиме с числом включений до 630 в час и ПВ до 25 % со следующим повторением не раньще чем через 3 ч.-Интервал времени между выключением и включением на обратное направление — не менее 50 мс. Максимальная продолжительность непрерывной работы механизма в реверсивном режиме не должна превышать 10 мИн.
В механизмах по заказу могут быть установлены индукционные БДИ-6 или БСПИ-10, реостатные БДР-П или БСПР-Ш, токовые БСПТ-10 или БСПТ/К датчики.
Механизмы должны устанавливаться с горизонтальным расположением выходного вала. Допускается расположение вала наклонно под углом 15° к горизонтали.
Прежде чем приступить к монтажу, необходимо осмотреть механизмы и убедиться в отсутствии внешних повреждений. Крепление механизмов производить четырьмя болтами. Необходимо предусмотреть место для обслуживания механизмов со стороны датчика и ручного привода.
Принципиальные электрические схемы механизмов представлены на рис. 13.6. На рис. 13.6, а приведена схема подключения к колодке зажимов механизма датчиков БДИ-6 и электродвигателя. В случае применения датчиков БДР-П и БСПТ-10 они подключаются по схемам на рис. 13.6,6 и в соответственно.
Сопротивления реостатов Лр; и Rp2 выполнены каждый в виде потенциометров и (рис. 13.6, г) и «3 и «4 (рис. 13.6,д).
В случае применения реостатного датчика БДР-П для работы механизма при угле поворота выходного вала не более 90° используются потенциометры R и /?2 со схемой соединения, приведенной на рис. 13.6, г. При угле поворота до 240° используются потенциометры Лз и К* со схемой соединения, приведенной на рис. 13.6, д. К зажиму 18 колодки Х2 (рис. 13.6,6) можно присоединять провод I или 2 схемы на рис. 13.6,г; к зажиму J3 колодки Xi — провод 8 или 7 схемы на рис. 13.6, д.
Датчики БСПИ-10 имеют одну индуктивную катуШку, а датчики БСПР-10 — один