Содержание
- 1 Основные параметры электродвигателя постоянного тока
- 2 Особенности конструкции
- 3 Принцип функционирования
- 4 Механическая характеристика
- 5 Модели независимого возбуждения
- 6 Модели последовательного возбуждения
- 7 Модели смешанного возбуждения
- 8 Уравнение механической характеристики
- 9 Заключение
- 10 Видео на тему
 При проектировании электропривода электродвигатель должен выбираться так, чтобы его механические характеристики соответствовали механическим характеристикам производственного механизма. Механические характеристики дают взаимосвязь переменных в установившихся режимах.
При проектировании электропривода электродвигатель должен выбираться так, чтобы его механические характеристики соответствовали механическим характеристикам производственного механизма. Механические характеристики дают взаимосвязь переменных в установившихся режимах.
Механической характеристикой механизма называют зависимость между угловой скоростью и моментом сопротивления механизма, приведенными к валу двигателя) ω = f(Mс).
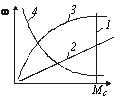
Рис. 1. Механические характеристики механизмов
Среди всего многообразия выделяют несколько характерных типов механических характеристик механизмов:
1. Характеристика с моментом сопротивления, не зависящим от скорости (прямая 1 на рис. 1). Независимая от скорости механическая характеристика графически изображается прямой, параллельной оси вращения, в данном случае вертикалью. Такой характеристикой обладают, например, подъемные краны, лебедки, поршневые насосы при неизменной высоте подачи и др.
2. Характеристика с моментом сопротивления линейно зависящим от скорости (прямая 2 на рис. 1). Такая зависимость присуща, например, приводу генератора постоянного тока с независимым возбуждением, работающему на постоянную нагрузку.
3. Характеристика с нелинейным возрастанием момента (кривая 3 на рис. 1). Типичными примерами емогут служить характеристики вентиляторов, центробежных насосов, гребных винтов. Для этих механизмов момент Мс зависит от квадрата угловой скорости ω . Это т.н. параболичская (вентиляторная) механическая характеристика.
4. Характеристика с нелинейно спадающим моментом сопротивления (кривая 4 на рис. 1). Здесь момент сопротивления обратно пропорционален скорости вращения. Мощность в этом случае остается постоянной на всем диапазоне рабочей скорости механизма. Например, у механизмов главного движения некоторых металлорежущих станков (токарных, фрезерных, расточных) момент Мс изменяется обратно пропорционально ω , а мощность потребляемая механизмом, остается постоянной.
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента ω д = f(M).Здесь следует иметь ввиду, что момент М на валу двигателя независимо от направления вращения имеет положительный знак – момент движущий. Вместе с тем момент сопротивления Мс имеет знак отрицательный.
В качестве примеров на рис. 2 приведены механические характеристики: 1 – синхронного двигателя; 2 – двигателя постоянного тока независимого возбуждения; 3 – двигателя постоянного тока последовательного возбуждения.
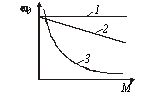
Для оценки свойств механических характеристик электропривода используют понятие жесткости характеристики. Жесткость механической характеристики определяется по выражению
где d М – изменение момента двигателя; d ω д – соответствующее изменение угловой скорости.
Для линейных характеристик значение β остается постоянным, для нелинейных – зависит от рабочей точки.
Используя это понятие, характеристики, приведенные на рис. 2, можно качественно оценить так: 1 – абсолютно жесткая ( β = ∞ ); 2 – жесткая; 3 – мягкая.
Абсолютно жесткая характеристика – скорость вращения двигателя остается неизменной при изменении нагрузки двигателя в пределах от нуля для номинальной. Такой характеристикой обладают синхронные двигатели.
Жесткая характеристика – скорость вращения меняется незначительно при изменении нагрузки от нуля до номинальной. Такой характеристикой обладает двигатель постоянного тока с параллельным возбуждением, а также асинхронный двигатель в области линейной части характеристики.
Жесткой характеристикой принято считать такую, у которой изменение скорости не превышает приблизительно 10% номинальной скорости при изменении нагрузки от нуля до номинальной.
Мягкая характеристика – скорость вращения двигателя меняется значительно при сравнительно небольших изменениях нагрузки. Такой характеристикой обладает двигатель постоянного тока с последовательным, смешанным или с параллельным возбуждением, но с добавочным сопротивлением в цепи якоря, а также асинхронный с сопротивлением в цепи ротора.
Для большинства производственных механизмов используют асинхронные двигатели с короткозамкнутым ротором, имеющие жесткую механическую характеристику.
Все механические характеристики электродвигателей делятся на естественные и искусственные.
Естественная механическая характеристика относится к условиям работы двигателя с номинальными значениями параметров.
Например, для двигателя с параллельным возбуждением естественная характеристика может быть построена для случая, когда напряжение на якоре и ток возбуждения имеют номинальные значения, а в цепи якоря отсутствует добавочное сопротивление.
Естественная характеристика асинхронного двигателя соответствует номинальному напряжению и номинальной частоте переменного тока, подводимого к статору двигателя при условия отсутствия добавочного сопротивления в цепи ротора.
Таким образом, для каждого двигателя естественная характеристика может быть построена только одна, а искусственных – неограниченное количество. Например, каждому новому значению сопротивления якоря двигателя постоянного тока или в цепи ротора асинхронного двигателя отвечает своя механическая характеристика.
Основные параметры электродвигателя постоянного тока
Постоянная момента
 ,
,
- где M – момент электродвигателя, Нм,
 – постоянная момента, Н∙м/А,
– постоянная момента, Н∙м/А,- I – сила тока, А
Постоянная ЭДС
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения: [1]
 ,
,
- где
 – электродвижущая сила, В,
– электродвижущая сила, В,  – постоянная ЭДС, В∙с/рад,
– постоянная ЭДС, В∙с/рад, – угловая частота, рад/с
– угловая частота, рад/с
Постоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц.
Постоянная электродвигателя
Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
 ,
,
- где
 – постоянная электродвигателя, Нм/√ Вт ,
– постоянная электродвигателя, Нм/√ Вт , - R – сопротивление обмоток, Ом,
 – максимальный момент, Нм,
– максимальный момент, Нм, – мощность потребляемая при максимальном моменте, Вт
– мощность потребляемая при максимальном моменте, Вт
Постоянная электродвигателя не зависит от соединения обмоток, при условии, что используется один и тот же материал проводника. Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят постоянную ЭДС, при этом постоянная электродвигателя останется не изменой.
Жесткость механической характеристики двигателя
 ,
,
- где
 – жесткость механической характеристики электродвигателя постоянного тока
– жесткость механической характеристики электродвигателя постоянного тока
Напряжение электродвигателя
Уравнение баланса напряжений на зажимах двигателя постоянного тока имеет вид (в случае коллекторного двигателя не учитывается падение напряжения в щеточно-коллекторном узле):
 ,
,
Уравнение напряжения выраженное через момент двигателя будет выглядеть следующим образом:

Соотношение между моментом и частотой вращения при двух различных напряжениях питания двигателя постоянного тока неизменно. При увеличении частоты вращения момент линейно уменьшается. Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя.
Благодаря таким характеристикам упрощается управление частотой вращения и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях [1].
Мощность электродвигателя постоянного тока
Упрощенная модель электродвигателя выглядит следующим образом:

- где I – сила тока, А
- U – напряжение, В,
- M – момент электродвигателя, Н∙м
- R – сопротивление токопроводящих элементов, Ом,
- L – индуктивность, Гн,
- Pэл – электрическая мощность (подведенная), Вт
- Pмех – механическая мощность (полезная), Вт
- Pтеп – тепловые потери, Вт
- Pинд – мощность затрачиваемая на заряд катушки индуктивности, Вт
- Pтр – потери на трение, Вт
Механическая постоянная времени
Механическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое частота вращения ненагруженного электродвигателя достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где
 – механическая постоянная времени, с
– механическая постоянная времени, с

Особенности конструкции
Двигатели постоянного тока представлены вращающимися нагнетательными элементами, которые размещаются на поверхности статически закрепленной станины. Устройства подобного типа получили широкое применение и эксплуатируются при необходимости обеспечивать разнообразие скоростного регулирования в условиях стабильности вращательных движений привода.
С конструктивной точки зрения все виды ДПТ представлены:
- роторной или якорной частью в виде большого количества катушечных элементов, покрытых специальной токопроводящей обмоткой;
- статичным индуктором в виде стандартной станины, дополненной несколькими магнитными полюсами;
- функциональным щеточным коллектором цилиндрической формы, располагающимся на валу и имеющим медную пластинчатую изоляцию;
- статично зафиксированными контактными щетками, используемыми с целью подведения достаточного количества электротока на роторную часть.
Как правило, электрические двигатели ПТ оснащаются специальными щетками графитового и медно-графитного типа. Вращательные движения вала провоцируют замыкание и размыкание контактной группы, а также способствуют искрению.
Принцип функционирования
Синхронные устройства обращенного функционала характеризуются сменой выполнения задач статором и ротором. Первый элемент служит для возбуждения магнитного поля, а второй в этом случае преобразует достаточное количество энергии.
Якорное вращение в условиях магнитного поля наводится при помощи ЭДС, а движение направлено в соответствии с правилом правой руки. Поворот на 180 о сопровождается стандартной сменой движения ЭДС.

Принцип действия двигателя постоянного тока
Коллекторы посредством щеточного механизма соединяются с двумя витковыми сторонами, что провоцирует удаление пульсирующего напряжения и вызывает образование постоянных токовых величин, а снижение якорной пульсации осуществляется добавочными витками.
Механическая характеристика
На сегодняшний день эксплуатируются электромоторы ПТ нескольких категорий, имеющие различные виды возбуждения:
- независимого типа, при котором обмоточное питание определяется независимым источником энергии;
- последовательного типа, при котором подключение якорной обмотки выполняется в последовательном направлении с обмоточным элементом возбуждения;
- параллельного типа, при котором роторная обмотка подключается в электрической цепи в параллельном для источника питания направлении;
- смешанного типа, основанном на наличии нескольких последовательных и параллельных обмоточных элементов.

Механическая характеристика двигателя постоянного тока независимого возбуждения ДПТ
Благодаря особым механическим характеристикам устройства с постоянными токовыми величинами способны легко переносить негативные внешние воздействия, что объясняется закрытым корпусом с уплотнительными элементами, абсолютно исключающими попадание влаги внутрь конструкции.
Модели независимого возбуждения
Моторы ПТ НВ обладают обмоточным возбуждением, подключаемым к отдельному виду источника для электрического питания. В таком случае обмоточная цепь возбуждения ДПТ НВ дополняется реостатом регулировочного типа, а якорная цепь снабжается добавочными или пусковыми реостатными элементами.
Отличительной особенностью такого вида мотора является независимость токового возбуждения от якорного тока, что обуславливается независимым питанием обмоточного возбуждения.

Характеристики электродвигателей с независимым и параллельным возбуждением
Линейная механическая характеристика при независимом типе возбуждения:
- ω — показатели вращательной частоты;
- U — показатели напряжения на эксплуатируемой якорной цепи;
- Ф — параметры магнитного потока;
- Rя и Rд — уровень якорного и добавочного сопротивления;
- Α — константа конструкции движка.
Данным типом уравнения определяется зависимость вращательной скорости мотора к моменту вала.
Модели последовательного возбуждения
ДПТ с ПТВ представляют собой устройство электрического типа с постоянными токовыми величинами, имеющими обмотку возбуждения, последовательно подключенную к якорной обмотке. Данный тип движков характеризуется справедливостью следующего равенства: током, протекающим в обмотке якоря, равным током обмоточного возбуждения, или I=Iв=Iя.
При использовании последовательного типа возбуждения:
- n0 — показатели частоты вращения вала в условиях холостого хода;
- Δn — показатели изменения частоты вращения в условиях механической нагрузки.
Смещение механических характеристик вдоль оси ординат позволяет им оставаться в полностью параллельном расположении друг другу, благодаря чему регулирование вращательной частоты при изменении данного напряжения U, подведенного к якорной цепи, становится максимально благоприятным.
Модели смешанного возбуждения
Для смешанного возбуждения свойственно расположение между параметрами устройств параллельного и последовательного возбуждения, чем легко обеспечивается значительность пускового момента и полностью исключается любая возможность «разноса» движкового механизма в условиях холостого хода.
В условиях смешанного типа возбуждения:

Двигатель смешанного возбуждения
Регулировка частоты моторного вращения при наличии возбуждения смешанного типа осуществляется по аналогии с двигателями, имеющими параллельное возбуждение, а варьирование МДС-обмоток способствует получению практически любой промежуточной механической характеристики.
Уравнение механической характеристики
Наиболее важные механические характеристики ДПТ представлены естественными и искусственными критериями, при этом первый вариант сравним с номинальным напряжением питания в условиях полного отсутствия добавочного сопротивления на обмоточных цепях мотора. Несоответствие любому из заданных условий позволяет рассматривать характеристику в качестве искусственной.
Это же уравнение может быть представлено в форме ω = ω о.ид. — Δ ω, где:
- ω о.ид. = Uя/kФ
- ω о.ид — показатели угловой скорости холостого идеального хода
- Δ ω = Мэм. [(Rя+Rд)/(kФ)2]— снижение показателей угловой скорости под воздействием нагрузки на вал мотора при пропорциональном сопротивлении цепи якоря
Заключение
Согласно применяемым механическим характеристикам любые ДПТ отличаются конструктивной простотой, доступностью управления и возможностью осуществлять регулировку частоты валового вращения, а также легкостью пуска ДПВ. Кроме прочего, такие устройства могут применяться в качестве генератора и обладают компактными габаритами, что хорошо нивелирует недостатки в виде быстро изнашиваемых графитовых щеток, высокой себестоимости и необходимости обязательно подключать токовые выпрямители.
