Содержание
- 1 Шаговый двигатель – принцип работы
- 2 Где купить шаговый двигатель
- 3 Драйвер для управления шаговым двигателем
- 4 Подключение шагового двигателя к Ардуино
- 5 Обзор основных моделей шаговых двигателей для ардуино
- 6 Описание библиотеки для работы с шаговым двигателем
- 7 Пример скетча для управления
- 8 Заключение
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ-48. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. В этой статье вы найдете описание схемы работы шаговых двигателей, пример подключения к Arduino с помощью драйверов на базе ULN2003 и примеры скетчей с использованием стандартной библиотеки Stepper.
Шаговый двигатель – принцип работы
Шаговый двигатель – это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора. Также в шаговых двигателях имеется возможность быстрого старта, остановки, реверса.
Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию. Работа двигателя осуществляется следующим образом – в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.


 Упрощенные анимированные схемы работы шагового двигателя
Упрощенные анимированные схемы работы шагового двигателя
Основные виды шаговых моторов:
- Двигатели с переменными магнитами (применяются довольно редко);
- Двигатели с постоянными магнитами;
- Гибридные двигатели (более сложные в изготовлении, стоят дороже, но являются самым распространенным видом шаговых двигателей).
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
- Увеличение крутящего момента на 40% по сравнению с униполярными двигателями;
- Возможность применения двигателей с любой конфигурацией фазной обмотки.
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
 Драйвер двигателя L298N
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003
Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
- Они позволяют стабилизировать фазные токи;
- Возможность установки микрошагового режима;
- Обеспечение защиты ключа от замыкания;
- Защита от перегрева;
- Оптоизоляция сигнала управления, высокая защищенность от помех.
В STEP/DIR драйверах используется 3 сигнала:
- STEP – импульс, который инициирует поворот на шаг/часть шага в зависимости от режима. От частоты следования импульсов будет определяться скорость вращения двигателя.
- DIR – сигнал, который задает направление вращения. Обычно при подаче высокого сигнала производится вращение по часовой стрелке. Этот тип сигнала формируется перед импульсом STEP.
- ENABLE – разрешение/запрет работы драйвера. С помощью этого сигнала можно остановить работу двигателя в режиме без тока удержания.
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Подключение шагового двигателя к Ардуино
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.
 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Еще один вариант схемы с использованием L298:
 Подключение шагового двигателя к Ардуино на базе L298
Подключение шагового двигателя к Ардуино на базе L298
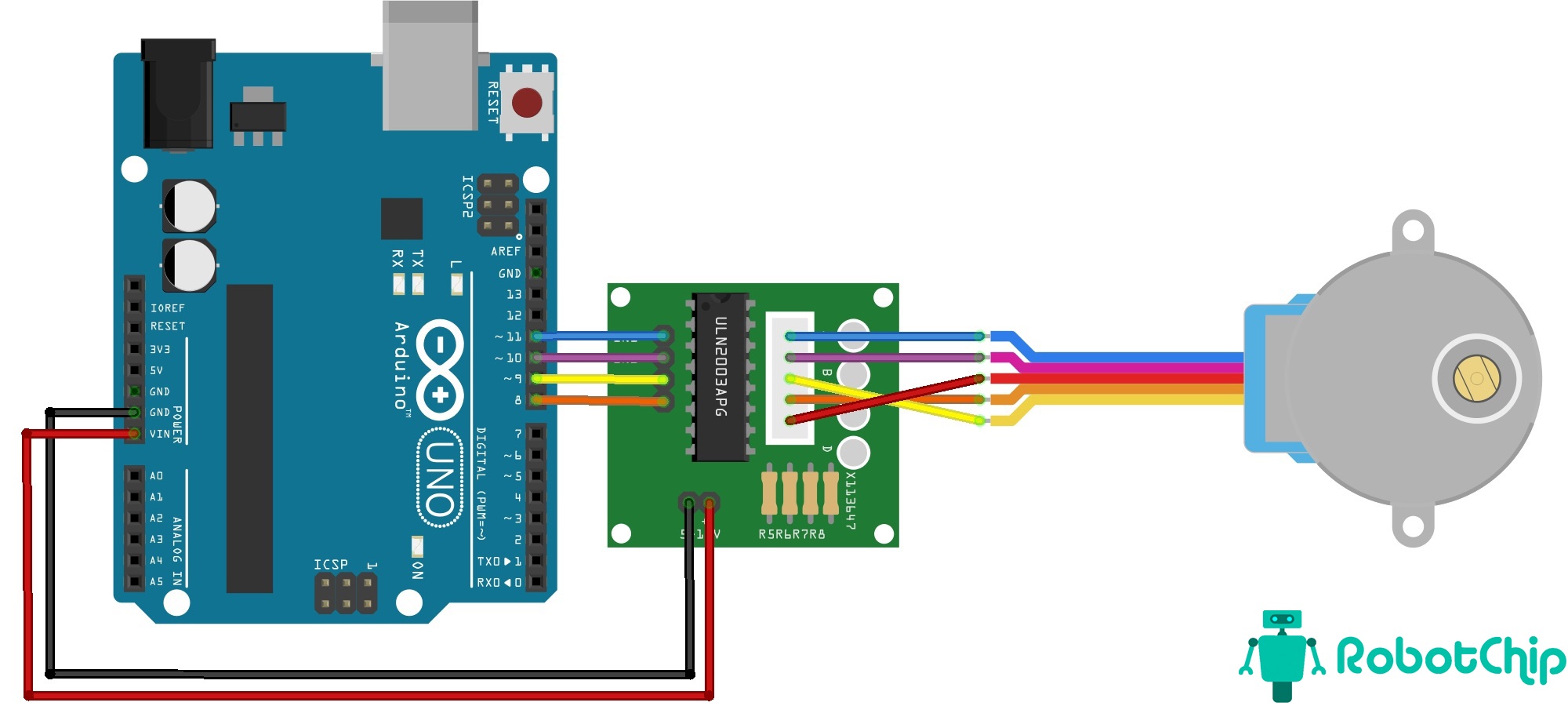
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
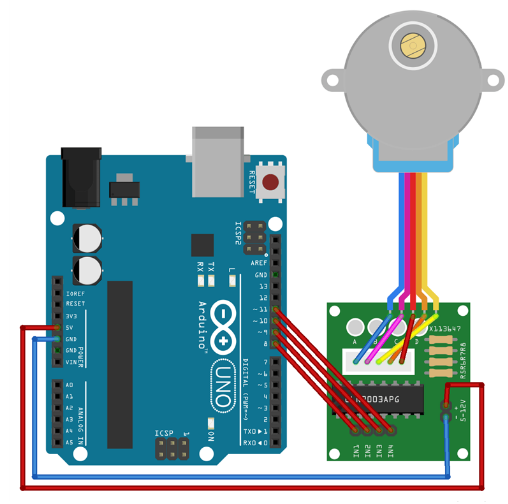 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Принципиальная схема подключения.
 Принципиальная схема подключения шагового двигателя
Принципиальная схема подключения шагового двигателя
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.

Обзор основных моделей шаговых двигателей для ардуино
Nema 17 – биполярный шаговый двигатель, который чаще всего используется в 3D принтерах и ЧПУ станках. Серия 170хHSхххА мотора является универсальной.

Основные характеристики двигателя:
- Угловой шаг 1,8°, то есть на 1 оборот приходится 200 шагов;
- Двигатель – двухфазный;
- Рабочие температуры от -20С до 85С;
- Номинальный ток 1,7А;
- Момент удержания 2,8 кг х см;
- Оснащен фланцем 42 мм для легкого и качественного монтажа;
- Высокий крутящий момент – 5,5 кг х см.
28BYJ-48 – униполярный шаговый двигатель. Используется в небольших проектах роботов, сервоприводных устройствах, радиоуправляемых приборах.

- Номинальное питание – 5В;
- 4-х фазный двигатель, 5 проводов;
- Число шагов: 64;
- Угол шага 5,625°;
- Скорость вращения: 15 оборотов в секунду
- Крутящий момент 450 г/сантиметр;
- Сопротивление постоянного тока 50Ω ± 7% (25 ℃).
Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
- Stepper(количество шагов, номера контактов). Эта функция создает объект Stepper, которая соответствует подключенному к плате Ардуино двигателю. Аргумент – контакты на плате, к которым подключается двигатель, и количество шагов, которые совершаются для полного оборота вокруг своей оси. Информацию о количестве шагов можно посмотреть в документации к мотору. Вместо количества шагов может быть указан угол, который составляет один шаг. Для определения числа шагов, нужно разделить 360 градусов на это число.
- Set Speed(long rpms) – функция, в которой указывается скорость вращения. Аргументом является положительное целое число, в котором указано количество оборотов в минуту. Задается после функции Step().
- Step(Steps) –поворот на указанное количество шагов. Аргументом может быть либо положительное число – поворот двигателя по часовой стрелке, либо отрицательное – против часовой стрелки.
Пример скетча для управления
В наборе примеров библиотеки Stepper.h существует программа stepper_oneRevolution, в которой задаются все параметры для шагового двигателя – количество шагов, скорость, поворот.
Заключение
В этой статье мы с вами узнали, что такое шаговый двигатель, как можно его подключить к ардуино, что такое драйвер шагового двигателя. Мы также рассмотрели пример написания скетча, использующего встроенную библиотеку Stepper. Как видим, ничего особенно сложного в работе с шаговыми моторами нет и мы рекомендуем вам обязательно поэкспериментировать самостоятельно и попробовать включить его в своих проектах Arduino.
Сегодня вы узнаете о четырехфазном шаговом двигателе 28BYJ-48, работающим от постоянного напряжения 5 Вольт. Также существует его модификация на 12 Вольт. Двигатель потребляет значительный ток, а это значит, что мы не можем подключить его напрямую к выводам Arduino. Воспользуемся для этого драйвером двигателя на микросхеме ULN2003.
Технические параметры двигателя 28BYJ-48
- Модель: 28BYJ-48
- Тип двигателя: Униполярный
- Напряжение питания: 5 Вольт, DC
- Количество фаз: 4
- Частота: 100 Гц
- Сопротивление: 50Ω ± 7% (при 25 ℃)
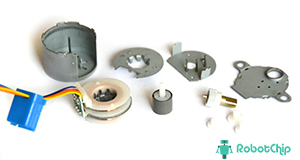
Общие сведения о движке
4-х фазный шаговый двигатель 28BYJ-48 — это бесколлекторный двигатель, имеющий дискретное перемещение (вращение вала осуществляется шагами). На роторе (валу), расположен магнит, а вокруг него находятся катушки. Подавая поочередно ток на эти катушки, создается магнитное поле, которое отталкивает или притягивает магнитный вал, заставляя двигатель вращаться. Такая конструкция позволяет с большой точностью управлять валом, относительно катушек. Принципиальная схема четырехфазного шагового двигателя 28BYJ-48 приведена ниже.
Двигатель называется четырех фазным, из-за того, что в нем содержится две обмотки, которые, в свою очередь, разделены на четыре. (Это отражено на схеме выше). Центральные отводы катушек подключены вместе и служат для питания двигателя. Так как каждая обмотка подключена к питанию, такие двигатели называют униполярными. На роторе 28BYJ-48 расположено 8 магнитов, с чередующимися полюсами (то есть, четыре магнита с двумя полюсами).
На рисунке видно, что внутри расположен редуктор, с примерным передаточным числом в 1:64, если быть точнее 1:63,68395. Это значит, что двигатель за один оборот осуществляет 4075.7728395 шага. Данный двигатель поддерживает полушаговый режим и за один полный оборот может совершать 4076 шага, а точнее за 1° делает примерно 11,32 шага. (4076 / 360 = 11,32).
Режимы работы двигателя:
Чаще всего, при использовании шагового двигателя 28BYJ 48, используют два режима подключения.
- Полушаговый режим — за 1 такт, ротор делает ½ шага.
- Полношаговый режим — за 1 такт, ротор делает 1 шаг.
Ниже представлены таблицы последовательности тактов:
Модуль управления шаговым двигателем ULN2003:
Цифровой вывод микроконтроллера выдает ток до
40 мА, а одна обмотка 28BYJ-48 в пике потребляет
320 мА, то есть, если подключить двигатель напрямую, микроконтроллер сгорит. Для защиты был разработан модуль шагового двигателя ULN2003, в котором используется микросхема ULN2003A (состоящая из 7 ключей), которая позволяет управлять нагрузкой до 500 мА (один ключ). Данный модуль может работать с 5 Вольтовым и 12 Вольтовым двигателем 28BYJ-48. Для переключения необходимо установить или убрать перемычку (по умолчанию перемычка установлена на питание 5 Вольт).
С принципиальной схемой модуля ULN2003 можно ознакомиться на рисунке ниже
- 1 — GND: «-» питание модуля
- 2 — Vcc: «+» питание модуля (5В или 12В)
- 3 — Vcc: «+» питание модуля (перемычка, только при 5В)
- 4 — Vcc: «+» питание модуля (перемычка, только при 5В)
Автор: Сергей · Опубликовано 29.08.2017 · Обновлено 27.09.2019
Сегодня расскажу о 4-х фазном шаговом двигателе 28BYJ-48, работающим от постоянного напряжения 5В (существует модификация на 12В). Так как двигатель потребляет значительный ток, мы не можем подключить его напрямую к выводам Arduino UNO, для этого воспользуемся так называемый «Драйвером двигателя» основанном на микросхеме ULN2003.
Технические параметры 28BYJ-48
► Модель: 28BYJ-48
► Тип шагового двигателя: Униполярный
► Напряжение питания: 5 В, DC
► Количество фазы: 4
► Частота: 100 Гц
► Сопротивление постоянного тока: 50Ω ± 7% (25 ℃)
Общие сведения
Немного теории, четырех фазный шаговый двигатель (28BYJ-48) — это бесколлекторный двигатель, вращение вала осуществляется шагами (дискретное перемещение). На роторе (валу), расположен магнит, а вокруг него расположены катушки, если поочередно подавать ток на эти катушки, создается магнитное поле, которое отталкивает или притягивает магнитный вал, тем самым заставляя двигатель вращаться. Такая конструкция позволяет с большой точностью управлять валом, относительно катушек. Принципиальная схема четырехфазного шагового двигателя 28BYJ-48 приведена ниже.

Из принципиальной схемы видно, что в двигателе содержится две обмотки, которые в свою очередь разделены на четыре, из-за этого и название 4-х фазный. Центральные отводы катушек подключены вместе и служат для питания двигателя, так-как каждая обмотка подключена к питанию, такие двигатели называют униполярный. На валу 28BYJ-48 расположено 8 магнитов, с чередующими полюсами (то есть, четыре магнита с двумя полюсами).
Из рисунка видно, что внутри расположен редуктор, с примерным передаточным числом в 1:64, если быть точнее 1:63,68395. Это означает, что двигатель за один оборот осуществляет 4075.7728395 шага. Данный двигатель поддерживает полушаговый режим и за один полный оборот может совершать 4076 шага, а точнее за 1° делает примерно 11,32 шага. (4076 / 360 = 11,32).
Режим работы:
Чаще всего, при использовании шагового двигателя 28BYJ 48, используют два режима подключения.
► Полношаговый режим — за 1 такт, ротор делает 1 шаг.
► Полушаговый режим — за 1 такт, ротор делает ½ шага.
Ниже переставлена таблица последовательности тактов:


Модуль шагового двигателя ULN2003:
Цифровой вывод микроконтроллера может выдать ток
40 мА, а одна обмотка 28BYJ-48 в пике потребляем
320 мА, следовательно если подключить двигатель напрямую, микроконтроллер сгорит. Для защиты был разработан «Модуль шагового двигателя ULN2003″, в котором используется микросхема ULN2003A (по сути, состоящая из 7 ключей), позволяющая управлять нагрузкой до 500 мА (один ключ). Данный модуль может работать с 5В и 12В двигателем 28BYJ-48, для переключения необходимо установить или убрать перемычку (по умолчанию перемычка установлена, питание 5В).
Принципиальную схему модуля ULN2003 можно посмотреть на рисунке ниже

Назначение X1
► IN1 . . . IN7: Вход 1 … 7 Назначение X2
► 1 — GND: «-» питание модуля
► 2 — Vcc: «+» питание модуля (5В или 12В)
► 3 — Vcc: «+» питание модуля (перемычка, только при 5В)
► 4 — Vcc: «+» питание модуля (перемычка, только при 5В)
Назначение X3
► A . . . G: Выход 1 … 7
Назначение X3
► 1 — Питание
► 2 — A
► 3 — B
► 4 — C
► 5 — D
Подключение шагового двигателя 28BYJ-48
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Модуль драйвера шагового двигателя ULN2003 x 1 шт.
► Шаговый двигатель 28BYJ-48-5V (5В) x 1 шт.
► Провод DuPont, 2,54 мм, 20 см, F-M (Female — Male) x 1 шт.
► Кабель USB 2.0 A-B x 1 шт.
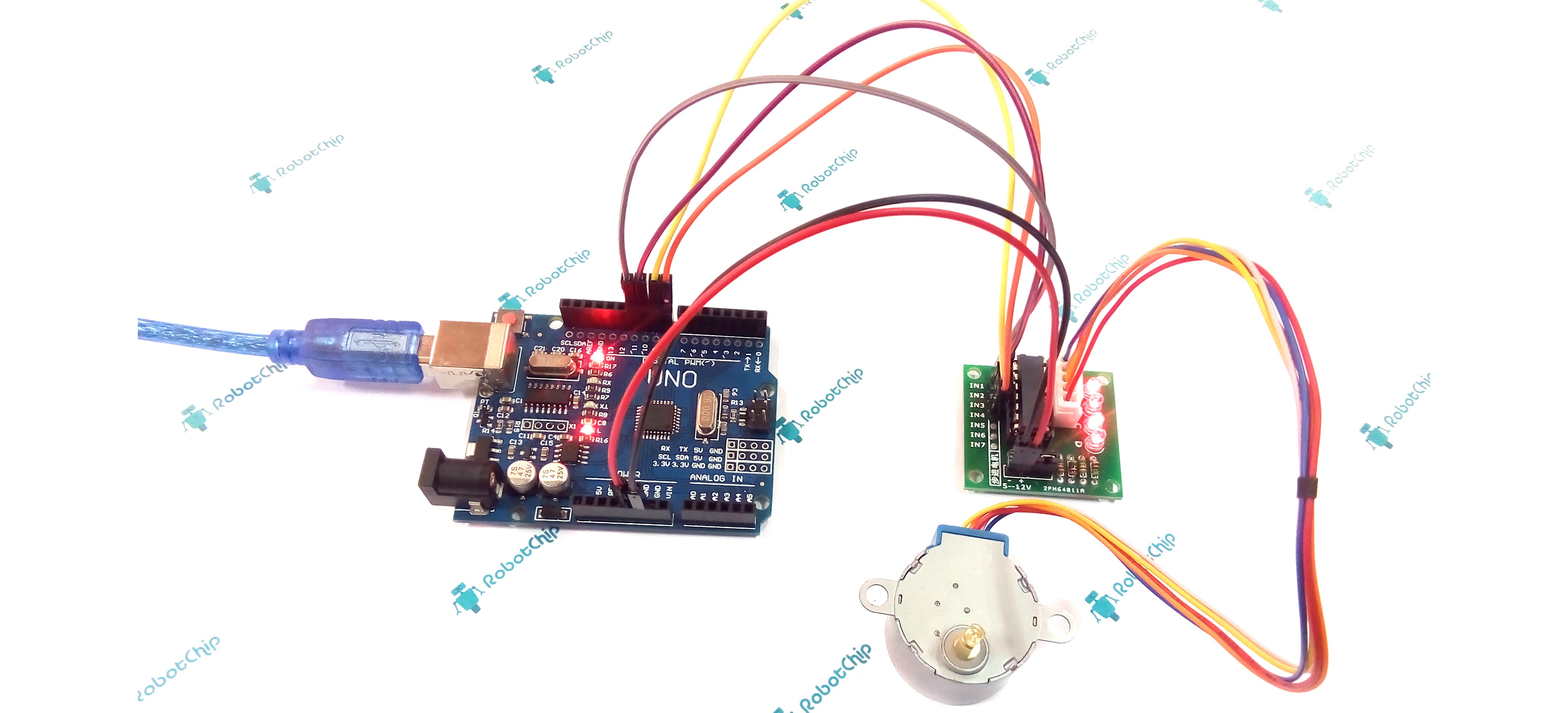
Подключение:
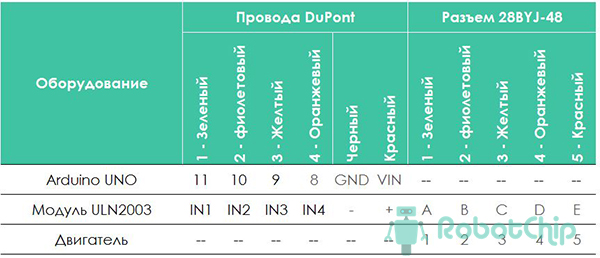
В данном примере буду использовать модуль ULN2003, Arduino UNO R3 и двигатель 28BYJ-48-5V. Схема не сложная, необходимо всего шесть провода, сначала подключаем интерфейсные провода, IN1 (ULN2003) в 11 (Arduino UNO), IN2 (ULN2003) в 10 (Arduino UNO), IN3 (ULN2003) в 9 (Arduino UNO) и IN4 (ULN2003) в 8 (Arduino UNO), осталось подключить питание GND к GND и VCC к VIN (не для постоянного использовании), подключаем разъем двигателя в модуль ULN2003. Схема собрана, теперь надо подготовить программную часть.
Для вращения двигателя по часовой и против часовой стрелки, используем библиотеку «CustomStepper«. Данная библиотека не входит в стандартную среду разработки Arduino IDE, так что скачиваем и добавляем ее. Далее, запускаем среду разработки IDE и копируем скетч (для удобства, добавлю файл для скачивания), если все правильно сделали, двигатель начнет вращаться.