Содержание

Товары
Обзор датчика пространства GY-521 (MPU6050)
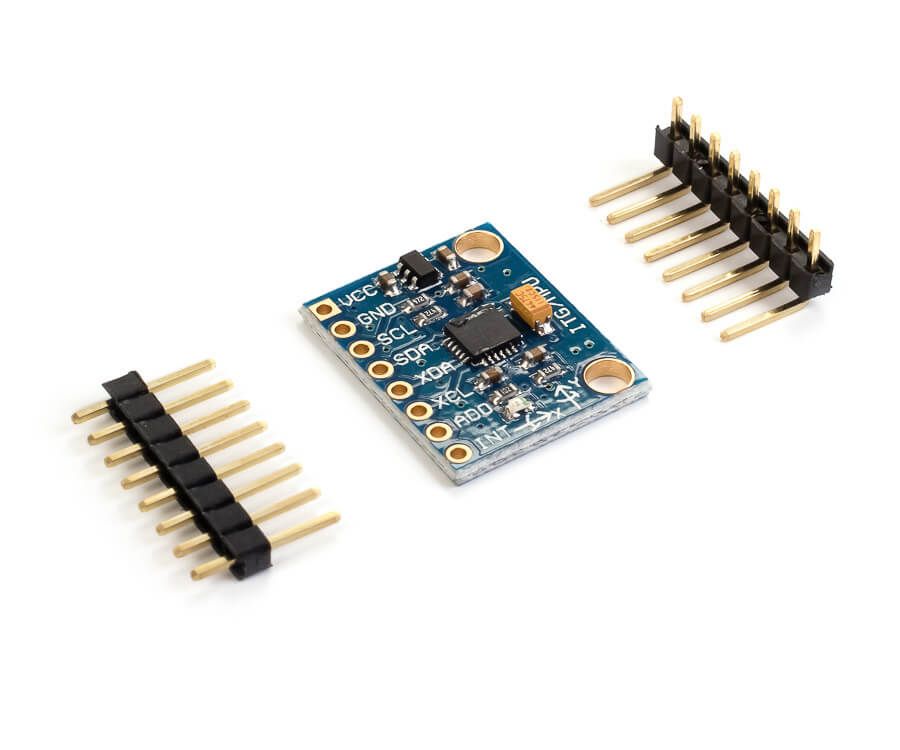
GY-521 (рис. 1) – модуль с гироскопом, акселерометром и термометром на базе микросхемы MPU-6050 используется в любительской робототехнике для определения положения в пространстве.

Рисунок 1. Модуль GY521.
Модуль GY-521 построен на базе микросхемы MPU6050. На плате модуля также расположена необходимая обвязка MPU6050, включая подтягивающие резисторы интерфейса I 2 C. Гироскоп используется для измерения линейных ускорений, а акселерометр – угловых скоростей. Совместное использование акселерометра и гироскопа позволяет определить движение тела в трехмерном пространстве.
Характеристики модуля GY-521 (MPU6050)
Питание: 3,5 – 6 В;
Ток потребления: 500 мкА;
Акселерометр диапазон измерений: ± 2 ± 4 ± 8 ± 16g,
Гироскоп диапазон измерений: ± 250 500 1000 2000 ° / s,
Подключение к плате Arduino
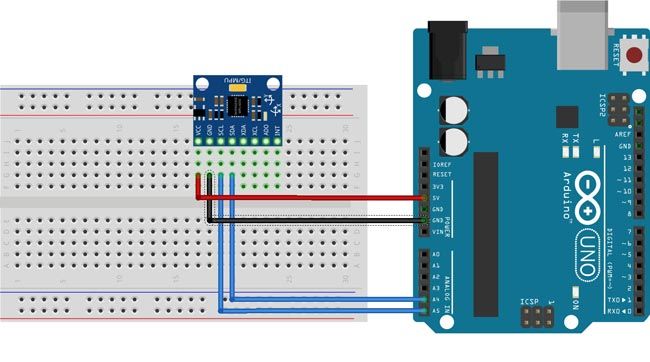
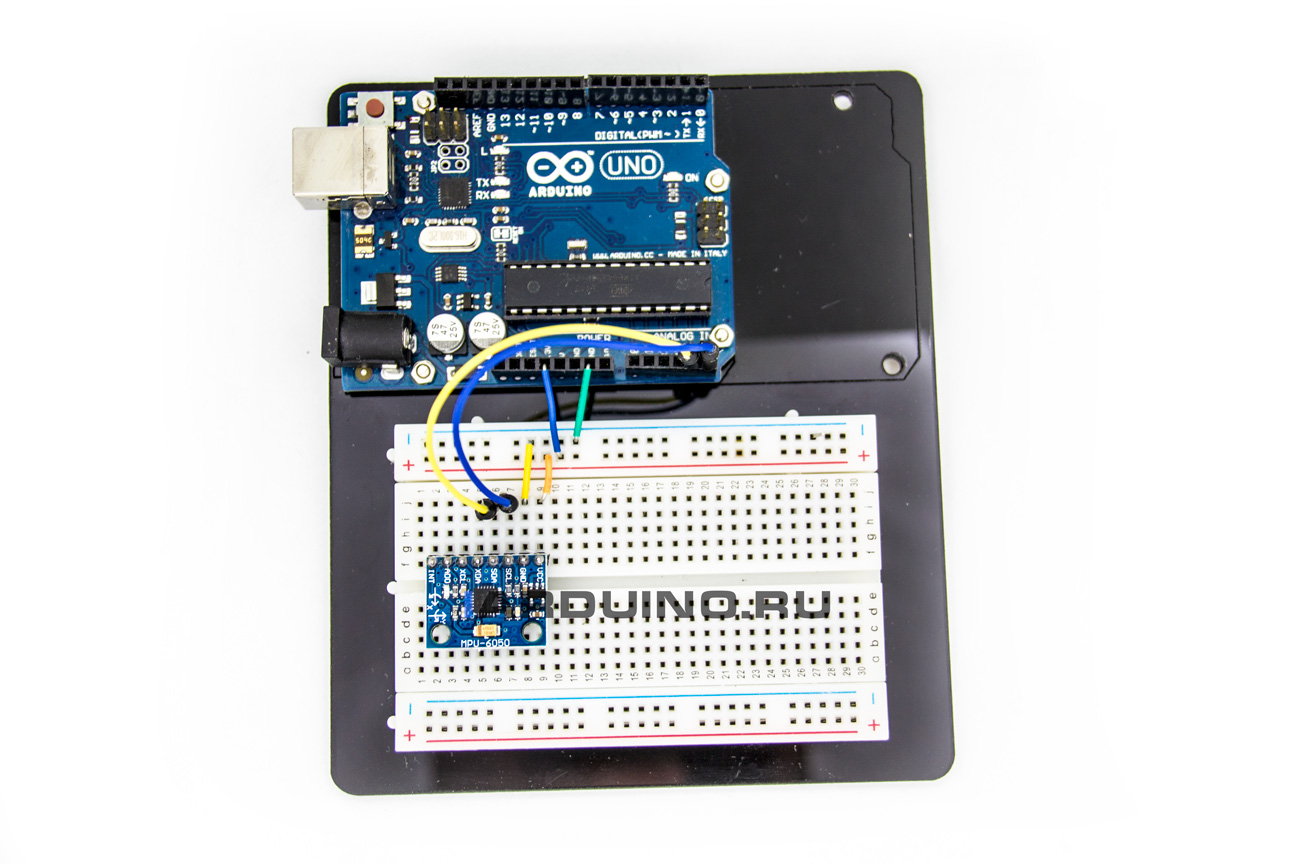
Подключение к плате Arduino по интерфейсу I2C. Схема подключения показана на рис. 2.
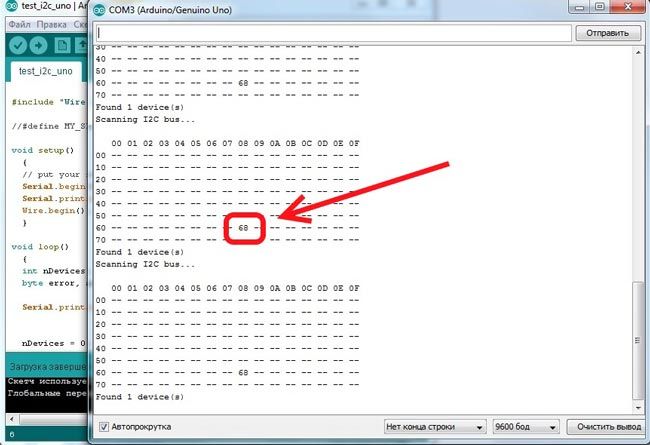
Загрузив на плату Arduino скетч сканирования I2C-устройств (Листинг 1), в мониторе последовательного порта увидим I2C-адрес модуля MPU6050 – 0x68 (рис. 3).
Получение показаний датчика MPU6050
Для работы с датчиком MPU6050 будем использовать библиотеки I2Cdev и MPU6050. После установки библиотек загрузим на плату Arduino скетч для отображения показаний акселерометра по одной из осей – оси x. Содержимое скетча показано в листинге 2.
Для отображения данных выбираем в настройках Плоттер по последовательному соединению (рис. 4). Смотрим показания вращая датчик по оси x в одну и другую стороны.
Библиотека MPU6050 по умолчанию настраивает датчик на диапазон ±8g (возможные значения ±2g, 4g, 8g и 16g). для 16 разрядного АЦП датчика это значения от -2 15 до 2 15 , поэтому возможные значения на графике ±2 15 /16*8 (-16384 до 16384).
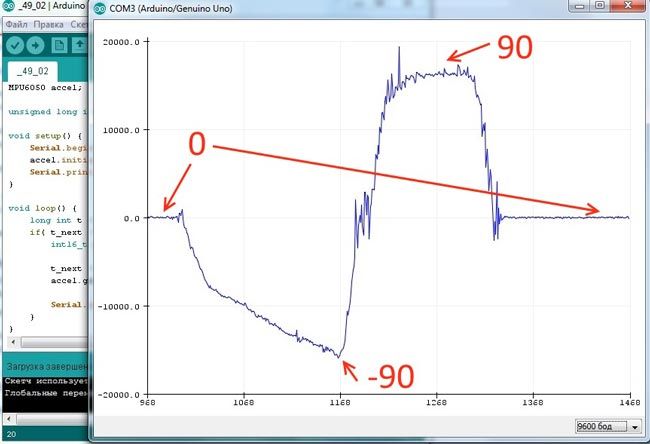
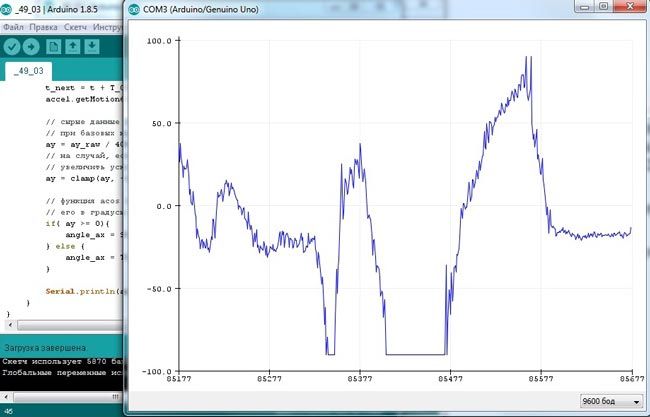
Скетч из листинга 3 преобразует сырые показания датчика MPU6050 в угол наклона датчика относительно оси x.
И смотрим показания угла наклона, вращая датчик по оси x в одну и другую стороны (рис. 5).
Пример использования
В качестве примера рассмотрим проект по созданию пульта на MPU6050 для удаленного управления движущейся платформой.
Нам потребуются следующие компоненты. Для пульта управления:
Плата Arduino Nano – 1;
Плата прототипирования – 1;
Модуль MPU6050 – 1;
передатчик FS1000A – 1;
Для движущейся платформы:
Плата Arduino Nano – 1;
Двухколесная движущаяся платформа – 1;
Модуль драйвера L298N – 1;
приемник MX-RM-5V – 1;
Блок батарей 18650 – 1;
Схема соединения элементов пульта управления показана на рис. 6.
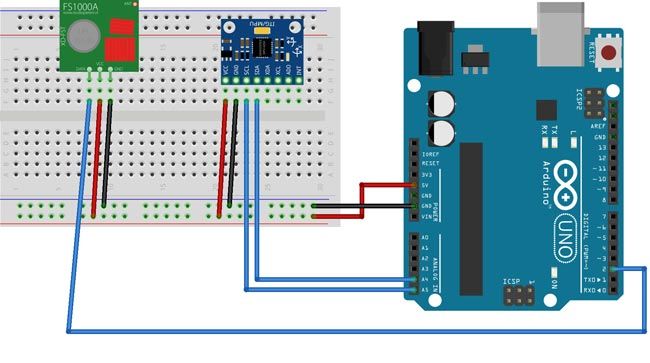
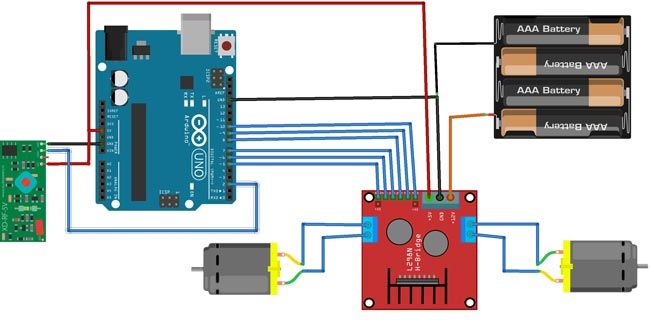
Схема соединений для компонентов для движущейся платформы показана на рис. 7.
Приступим к написанию скетчей. Передатчик отправляет 3 значения – начальный байт отправки B11111111 и 2 значения наклона датчика – по оси x и по оси y.
Содержимое скетча показано в листинге 4.
Плата Arduino на движущейся платформе должна получать данные и преобразовывать их в команды установки скорости для двух моторов.
Содержимое скетча показано в листинге 5.
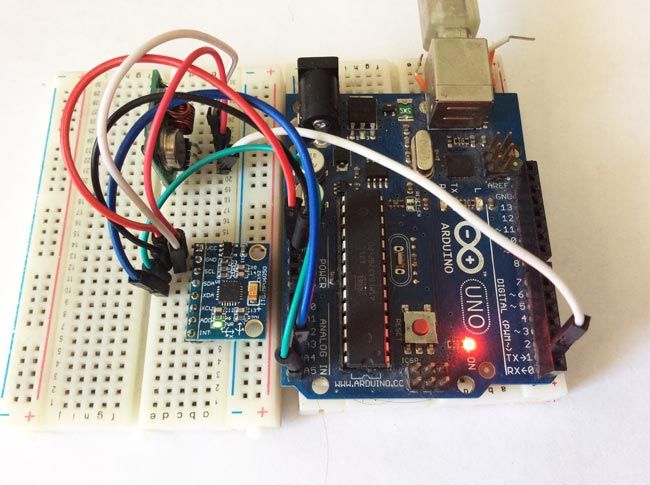
Рисунок 8. Пульт
Рисунок 9. Движущаяся платформа
Часто задаваемые вопросы
1. Нет данных с датчика MPU6050
- Проверьте правильность подключения датчика к плате Arduino.
Ардуино – популярнейшая система для одноимённых МК, позволяющая любому желающему, даже без специального образования, воплотить в жизнь проект, о котором он давно мечтал. Будь то автоматизированная теплица или простая система выключения света по хлопку в умном доме.
Но естественно, сам микроконтроллер не способен выполнять все функции, и для этого к нему необходимо покупать датчики, коих на рынке более нескольких десятков разновидностей. Об одном из таких, а именно мы рассмотрим гироскоп Ардуино, и пойдёт речь. Что это такое, в каких проектах его можно применить и как настроить опишем ниже.
Назначение связки гироскоп и акселерометр
Для начала давайте разберёмся, зачем Arduino mpu 6050 (Gy-521) вообще нужен и что собой представляет гироскоп-акселерометр в целом. Такой датчик все мы видели в смартфонах, и там он выполняет следующие функции:
- Позволяет замерять шаги. Акселерометр способен отслеживать резкие движения устройства, а в зависимости от его настройки и чувствительности, считать некоторые из них за шаг.
- Измеряет поворот экрана. Здесь уже оба устройства работают в паре. Ведь когда вы поворачиваете смартфон набок, картинка должна изменить свою ориентацию для пользователя, и лишь с помощью гироскопа удаётся определить угол наклона, под которым ПО это должно будет сделать.
- Компас, карты и навигация. Акселерометр с гироскопом позволяют определить ориентацию устройства в пространстве, что необходимо в различных приложениях для мобильной навигации.
Вот и выходит, что данный датчик подойдёт для тех проектов, в которых вам необходимо измерить ориентацию или движения прибора в пространстве, без точных данных о его местоположении. Это может быть, как самодельная линейка со встроенным уровнем, чтобы пользователь мог определить, насколько ровно стоит та или иная мебель, так и устройство для кровати, встроенной в стену, включающее свет, когда она выдвигается.
Но применить модуль можно и с большей выдумкой, например, для измерения количества оборотов в секунду и регуляции мощности охладительной системы или автоматизации различных процессов.
Всё зависит исключительно от вашей выдумки и конкретного проекта.
Чаще всего гироскоп для Ардуино применяется в системах автоматизации под так называемые «смартхаусы» (умные дома – прим. ред.), являясь своеобразным переключателем. Передавая определённые данные в МК, который затем отправляет их по блютуз-модулю к другому устройству, он может управлять всей техникой в доме.
Ещё один простой способ применения – использование вместо датчика движения на дверях, для включения света и кондиционирования, когда вы возвращаетесь домой.
Комплектующие
Создаётся данный датчик или МК, в зависимости от того, что вы собрались приобретать, из компонентов ATmega328.
Распиновка модуля Arduino MPU 6050
Так, в нём имеются:
- 14 штук различных пинов и цифровых выходов, половина из которых являются ШИМ-выходами.
- Специальные кварцевые резонаторы до 16 МГц мощностью.
- Встроенный вход под usb-кабель, который позволит вам сэкономить не только время, но и деньги, которые вы могли бы потратить на покупку адаптера.
- Контакты и распиновка для стандартного питания с нулем, фазой и заземлением.
- Контакты для сброса до заводских настроек, при которых весь машинный код и данные будут стёрты. Это полезно в том случае, если вы напортачили с программой и модуль превратился в бесполезную груду железа, и просто как экономия времени, если необходимо сменить прошивку.
- ICSP контакт, который необходим для того, чтобы запрограммировать машинный код, который будет находиться внутри системы.
Все эти компоненты и составляют Arduino гироскоп, позволяя ему выполнять свои базовые функции. Но как же запрограммировать систему, если вы до этого не имели опыта работа с данными МК?
Сборка
Здесь всё зависит от используемого вами интерфейса, например, для I2C от Ардуино пригодятся контакты: A4, A5, которые являются SDA и SCL входами соответственно.
Для нормального функционирования всей этой системы необходимо будет использовать wire библиотеку в коде.
| Gy-521 (mpu6050) | Arduino (Uno) |
|---|---|
| VCC | 3.3 V |
| GND | GND |
| SCL | A5 |
| SDA | A4 |
Также будьте готовы к тому, что распиновка может оказаться не самой удачной, поэтому не стоит делать корпус для устройства впритык, пока вы не подключите и не увидите реальные размеры вашего проекта.
Программы
Без программы модуль будет не более чем грудой железа, которая не выполнит ни одной функции. Базовые библиотеки для взаимодействия с другими МК можно найти на официальном сайте или в интернете, но, помимо них, вам потребуется вспомогательный код. С его помощью можно настроить взаимодействие между акселерометром и тем же блютуз модулем, без которого, в большинстве проектов, он станет бесполезен.
Мы воспользуемся готовой библиотекой для Arduino MPU 6050, которую написал Джефф Роуберг.
В целом, многие поступают и другим путем, правда далеко не все умеют программировать на С++, поэтому перед пользователем, который хочет написать программу для работы с гироскопом, открывается два пути:
- Найти уже готовый шаблон или библиотеку. Для этого потребуется всего пара секунд и подключение к интернету, но не стоит забывать, что готовые решения пишутся, зачастую, столь же неопытными инженерами. Поэтому, по возможности, проверяйте, насколько качественный код вы скачиваете. Смотрите отзывы о библиотеке, если есть такая возможность, и старайтесь скачивать их на зарубежных форумах. Там и выбор будет больше, и куда выше вероятность найти действительно качественную библиотеку.
- Написать функции и методы для работы системы своими силами. Этот вариант подойдёт лишь тем, кто ранее имел дело с языком С++ и понимает все нюансы работы с Ардуино. Все необходимые вспомогательные библиотеки можно скачать в интернете, а всё остальное вы можете подогнать под свои нужды. Такой способ идеально подходит для тех, кто хочет реализовать собственный проект, не имеющий аналогов. Ведь в таком случае найти заготовленный код под него будет крайне сложно, даже если быть готовым править большую его часть.
Вернемся к нашей библиотеке. После того как вы скачали библиотеку гироскопа вам нужно сделать следующее.
Нужно распаковать/извлечь эту библиотеку, взять папку с именем «MPU6050» и поместить ее в папку «library» в Arduino. Для этого перейдите в место, где вы установили Arduino (Arduino -> libraries) и вставьте свою папку в папку библиотек. Возможно, вам также придется сделать то же самое, чтобы установить библиотеку I2Cdev, если у вас еще нет ее на вашем Ардуино. Для её установки выполните ту же процедуру, что и выше. Вы можете скачать I2Cdev на нашем сайте по этой ссылке.
Если вы всё сделали правильно, при открытии IDE Arduino вы можете увидеть «MPU6050» в:
Файл -> Примеры.
Затем откройте пример программы из меню:
Файл -> Примеры -> MPU6050 -> Примеры -> MPU6050_DMP6.
Затем вы должны загрузить этот код в свой Ардуино. После загрузки кода откройте последовательный монитор и установите скорость передачи в бодах как 115200. Затем проверьте, видите ли вы что-то вроде «Инициализация устройств I2C . » ("Initializing I2C devices . ") на последовательном мониторе.
Если вы этого не сделаете, просто нажмите кнопку сброса. Теперь вы увидите строку с надписью «Отправить символы, чтобы начать программирование и демо DMP» ("Send any character to begin DMP programming and demo"). Просто введите любой символ на последовательном мониторе и отправьте его, и вы должны начать видеть значения поступающие с MPU 6050.
Также можно, например, воспользоваться скетчем ниже, который пересчитывает координату X и Y и выводит в консоль (монитор последовательного порта):
Когда X и Y равны 180 – гироскоп в горизонтальной плоскости:
Вот вы определились с выбором и уже написали всё необходимое ПО, пришла пора его протестировать. Для этого, естественно, необходимо собрать всё вместе.
Наладка
Далее наступает самый ответственный этап – отладка программного кода. Здесь вам необходимо подключить питание к прибору, а сам прибор – к компьютеру, чтобы следить за строками в консоли. Прогоните несколько базовых функций и посмотрите, не будет ли ошибок или багов. Если они возникают, то воспользуйтесь любым удобным методом дебагинга.
Самый простой вариант – использовать для ввода переменные, которые вычисляются рандомным образом, и смотреть, как код будет вести себя в различных ситуациях.
Тестирование
После отладки необходимо провести тестирование. В чём разница? При тестировании вы точно знаете, что программный код работает без лагов и багов, но вам необходимо убедиться, что в нём нет логических ошибок.
С акселерометром и гироскопом проще всего использовать программы 3Д рендеринга показаний, вроде ShowGY521Data, которые позволят в реальном времени увидеть, как железо позиционируется в пространстве. В случае неисправностей всегда можно подправить нулевой уровень и уменьшить чувствительность акселерометра, который также влияет на конечную модель отображения устройства.
Модуль Gy-521 выполнен на базе микросхемы MPU6050, это 3-осевой гироскоп и акселерометр. Данную модель можно использовать для определения положения в пространстве.
В данном уроке нам понадобится:
Для реализации проекта нам необходимо установить библиотеки:
В данном уроке рассмотрим библиотеку, которая позволяет преобразовать показания координат X и Y.
Подключение модуля производится следующим образом.
| Gy-521 (mpu6050) | Arduino (Uno) |
|---|---|
| VCC | 3.3 V |
| GND | GND |
| SCL | A5 |
| SDA | A4 |
Для питания модуля необходимо использовать строго 3.3V! Для этого можно использовать преобразователь напряжения на 3.3V.
Пришло время записать следующий скетч в нашу Arduino:
Данный пример пересчитывает координату X и Y и выводит в консоль (Монитор последовательного порта)
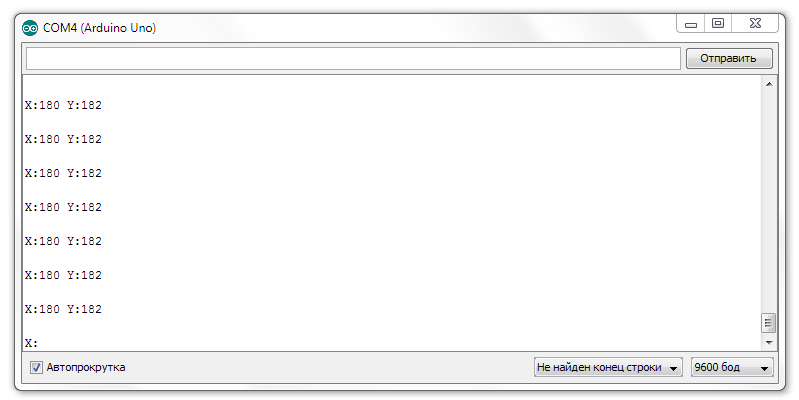
Когда X и Y равны 180, значит гироскоп находится в горизонтальной плоскости.