В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n 1 – n 2 ) / n 1, где n 1 – синхронная скорость вращения поля, об/мин, n2 – скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n 1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно: s = ((1500 – 1460) / 1500) х 100 = 2,7%

Асинхронный двигатель не может достичь синхронной скорости вращения даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 – частота тока, подводимого к статору.
Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 – 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до s н ом в 5-7 раз по отношению к начальному значению при пуске.
Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается.
Момент вращения может быть также определен по электромагнитной мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.

Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
З начения момента для номинального напряжения приводятся в каталогах для электрических машин. Знание минимального момента необходимо при расчете допустимости пуска или самозапуска механизма с полной нагрузкой механизма. Поэтому его значение для конкретных расчетов должно быть либо определено, либо получено от завода-поставщика.
Величина максимального значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не зависит от величины сопротивления ротора.
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и перемещением максимума момента в область более высоких скольжений (меньшей скорости вращения). Таким путем может быть достигнуто изменение характеристик моментов.
Изменение скольжения возможно увеличением сопротивления цени ротора или потока. Первый вариант осуществим только для асинхронных двигателей с фазным ротором (от S = 1 до S = Sном ) , но не экономичен. Второй вариант осуществим при изменении питающего напряжения, но только в сторону уменьшения. Диапазон регулирования мал, так как S возрастает, но одновременно уменьшается перегрузочная способность асинхронного двигателя. По экономичности оба варианта, примерно, равноценны.
В асинхронных двига т елях с фазным ротором изменение момента при различных скольжениях осуществляется с помощью сопротивления, вводимого в цепь обмотки ротора. В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью частотных преобразователей.
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
 где n — скорость вращения ротора асинхронного двигателя
где n — скорость вращения ротора асинхронного двигателя
Из этого выражения следует: n = (1 – s)n 0.
 или
или 
Частота тока ЭДС в обмотке ротора пропорциональны скольжению.
ЭДС потока рассеяния ротора  .
.
Уравнение электрического состояния ротора обмотки

Индуктивное сопротивление рассеяния при вращающемся роторе

Действующее значение тока в фазе вращающегося ротора.


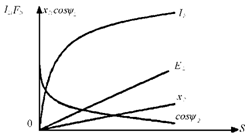
9. Рабочие характеристики асинхронного двигателя
 Зависимость К.П.Д., скорости, тока, вращающегося момента, cosφ, от мощности на валу, при
Зависимость К.П.Д., скорости, тока, вращающегося момента, cosφ, от мощности на валу, при  и
и  (называют рабочими характеристиками двигателя.
(называют рабочими характеристиками двигателя.

Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0..В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 2).
При увеличении нагрузки выше номинальной значительно увеличиваются магнитные потоки рассеяния, реактивная составляющая тока и реактивная мощность, угол φ увеличивается, cosφ – уменьшается. Таким образом, cosφмаксимален при номинальной нагрузке и уменьшается при недогрузке и перегрузке.
Зависимость между моментом М и полезной мощностью Р2 определяется соотношением
где ω2 — угловая скорость ротора.
Поскольку n2 изменяется мало, эта зависимость близка к линейной. Чтобы определить моментМ2 на валу двигателя, по круговой диаграмме находят электромагнитный момент М, а затем из него вычитают момент, обусловленный трением в двигателе, — Мт = ΔРт /ω2 :
Мощность Р2 ,отдаваемая машиной (Рэл в генераторах и Рмех в двигателях), пропорциональна току нагрузки I в первой степени, поэтому зависимость КПД от тока нагрузкиПри увеличении номинальной мощности относительная величина суммарных потерь уменьшается. Следовательно, должен возрастать и КПД машины. Эта закономерность проявляется во всех типах вращающихся электрических машин и в трансформаторах — машины большей.
10. Электромагнитный момент асинхронных машин
Для устойчивой работы двигателя необходимо, чтобы автоматически устанавливалось равновесие вращающего и тормозного момента на валу. С увеличением нагрузки навалу двигателя соответственно должен увеличиваться и вращающий момент. Это увеличение происходит так: при увеличении нагрузки на валу тормозной момент оказывается больше вращающего, уменьшается частота вращения ротора п, а скольжение увеличивается.


Увеличение скольжения ведет к увеличению вращающего момента, и наступает равновесие моментов при увеличении скольжения.
Зависимость момента от скольжения довольна сложна. В выражении  все величины (I2; Ф;cosφ2) зависят от скольжения. Ток ротора I2 с увеличением скольжения возрастает, что видно из формулы
все величины (I2; Ф;cosφ2) зависят от скольжения. Ток ротора I2 с увеличением скольжения возрастает, что видно из формулы  . Причем, при
. Причем, при  сила тока ротора
сила тока ротора
возрастает быстро, а при  – значительно медленней.
– значительно медленней.
-магнитный поток Ф пропорционален э.д.с. статора  , а
, а  при увеличении скольжения ток статора увеличивается, э.д.с. E1, уменьшается, значит магнитный поток Ф уменьшается.
при увеличении скольжения ток статора увеличивается, э.д.с. E1, уменьшается, значит магнитный поток Ф уменьшается.
-коэффициент мощности цепи ротора при увеличении скольжения уменьшается.

Значит при возрастании скольжения магнитный поток и ток ротора увеличивается, а коэффициент мощности уменьшается . Выражение момента через параметры асинхронного двигателя:
 Для определения условий максимального момента возьмем производную
Для определения условий максимального момента возьмем производную 
Решив это уравнение определим критическое скольжение, при котором момент максимален  .
.
Из полученного выражения видно, что sKP зависит от сопротивления фазы обмотки ротора. Чем больше активное сопротивление  ротора, тем ниже его скорость
ротора, тем ниже его скорость 
Мmax – соответствует обычно небольшим значениям скольжения, так как индуктивное сопротивление обмоток намного больше чем их активные сопротивления,  . При изменении скольжения от нуля до sKP работа двигателя является устойчивой, так как с увеличением тормозного момента на валу, скорость вращения ротора на валу уменьшается, скольжение увеличивается, увеличивается и вращающийся момент. Восстанавливается динамическое равновесие между тормозным и вращающим моментом (участок 1 и 2).
. При изменении скольжения от нуля до sKP работа двигателя является устойчивой, так как с увеличением тормозного момента на валу, скорость вращения ротора на валу уменьшается, скольжение увеличивается, увеличивается и вращающийся момент. Восстанавливается динамическое равновесие между тормозным и вращающим моментом (участок 1 и 2).
Дата добавления: 2018-10-14 ; просмотров: 801 | Нарушение авторских прав
Электромагнитный момент создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент М пропорционален электромагнитной мощности и определяется по формуле
, а
 ,
,
– угловая синхронная скорость вращения.
Зависимость момента от скольжения – механическая характеристика асинхронной машины. Механическая характеристика имеет максимум.
На рисунке 7.2 показана механическая характеристика асинхронной машины, где указаны зоны, соответствующие различным режимам работы:
Для анализа работы асинхронного двигателя удобнее воспользоваться механической характеристикой  , представленнойна рисунке 7.3.
, представленнойна рисунке 7.3.
При включении двигателя в электрическую сеть, магнитное поле статора, не обладая инерцией, сразу же начинает вращение с синхронной частотой n1 , в то же время ротор двигателя под влиянием сил инерции в начальный момент пуска остается неподвижным ( ) и скольжение s = 1.
) и скольжение s = 1.
Выражение пускового момента асинхронного двигателя:
 , Н·м,
, Н·м,
Под действием этого момента начинается вращение ротора двигателя, при этом скольжение уменьшается, а вращающий момент возрастает в соответствии с характеристикой M = f(s). При критическом скольжении sкp момент достигает максимального значения Мmах. С дальнейшим нарастанием частоты вращения момент М начинает убывать, пока не достигнет установившегося значения.
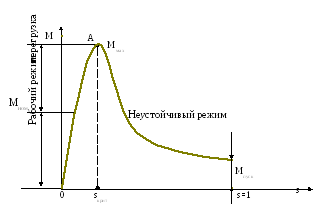
Рисунок 7.3 – Зависимость электромагнитного момента АД от скольжения
Из анализа механической характеристики следует, что устойчивая работа асинхронного двигателя возможна при скольжениях меньше критического ( ), то есть на участке ОА
), то есть на участке ОА
механической характеристики. Работа асинхронного двигателя становитсянеустойчивой при скольжениях  . Так, если электромагнитный момент двигателяМ=Mmax, a скольжение s=sкр, то
. Так, если электромагнитный момент двигателяМ=Mmax, a скольжение s=sкр, то
даже незначительное увеличение нагрузочного момента, вызвав увеличение скольжения s приведет к уменьшению момента М. За этим последует дальнейшее увеличение скольжения до s =1, то есть пока ротор не остановится. При достижении электромагнитным моментом максимального значения наступает предел устойчивой работы асинхронного двигателя.
Для надёжной работы асинхронного двигателя необходимо, чтобы он обладал перегрузочной способностью. Перегрузочная способность определяется отношением максимального момента  к
к
номинальному моменту  и составляет для двигателей общего назначения
и составляет для двигателей общего назначения
Видео о подготовке к тестам по теме “Асинхронный двигатель”: