В Петербурге впервые прошел один из крупнейших турниров России по боям роботов «Бронебот». На арене «Юбилейного» 100-килограммовые роботы били друг друга топорами и молотами и подбрасывали оппонентов в воздух. В боях участвовали чемпионы Европы и мира, но первое место заняла петербургская команда.
Как студенты собрали робота, способного подбросить легковую машину, почему участники шоу считают, что подобные битвы развивают российскую робототехнику, и зачем в соревнованиях участвуют дипломированные инженеры и физики со всего мира? Команды из Петербурга, Москвы и Лондона рассказали «Бумаге», как создают своих роботов и зачем участвуют в шоу.

Первые в России бои роботов прошли в октябре 2015 года в московском «Олимпийском». За основу организаторы взяли международное шоу Battle Bots, в котором радиоуправляемые роботы сражаются на ринге. Как утверждают создатели российского турнира, проект создан, чтобы отечественные разработчики могли продемонстрировать свои умения в робототехнике и инженерии.
Чтобы попасть на турнир, нужно предоставить робота из определенных материалов — зачастую пластика или акрила толщиной до 5 мм — и с установленными параметрами веса, высоты, длины и ширины. Роботы могут использовать, к примеру, подбрасывающее и режущее оружие, но огнестрельное, огнеопасное, электрическое и жидкое запрещены.
Выигрывает тот робот, который за время турнира смог вывести из строя большее количество соперников или нанести им максимальное количество повреждений. Судьи также могут добавлять очки роботу, поведение и стратегию которого они посчитают наиболее зрелищными.
Боевые роботы Battle Bot, как правило, довольно интересные и разнообразные. Мы представляем вам инструкцию одного мини-робота Battle Bot, который небольшой, очень легкий и простой в создании.
Вы его можете собрать в любое свободное и удобное для вас время. Он не требует дорогостоящих деталей и инструментов. Так что, приступим!
1 – серводвигатель и колеса; 2 – лезвие
Шаг 1. Материалы и инструменты:
Большинство материалов для робота можно найти прямо в доме, но если чего-то не хватает, их можно купить очень дешево.
- двигатель (12 Вольт)
- небольшое лезвие-пила
- несколько проводов
- два сервопривода
- 6-вольтная батарея
- 12-вольтная батарея
- колеса
- алюминиевая пластина
- небольшие винты
- небольшие болты
- радиоприемник
- радиопередатчик
- 2 зажимы
- суперклей
- переключатель
Инструменты:
- дрель или инструмент дремель
- ножницы для резки жестких материалов
- отвертки
- плоскогубцы
- заклепки
1 – серводвигатели и колеса; 2 – двигатель; 3 – плоскогубцы, батареи, передатчик и болты; 4 – передатчик и инструмент с заклепками; 5 – ножницы для резки жестких материалов.
Шаг 2. Колеса и сервоприводы:
Прежде всего, вам нужны две среднего размера сервоприводы, которые могут быть куплены на eBay и во многих других местах. Они должны быть настроены так, чтобы совершать полный оборот при использовании.
Колеса могут быть приклеены, желательно суперклеем к винтам сервопривода, это удержит их на месте. Могут быть использованы колеса практически любого размера.
1 – колесо, приклеенное к сервоприводу; 2 – настроенный сервопривод.
Шаг 3. Тело робота:
Это, пожалуй, самая трудная часть нашей работы. Тело робота может быть сделано, как вы пожелаете. Данный пример имеет тело в форме треугольника. Это вполне оптимальная форма для устройства, и её не сложно сделать.
Одну металлическую пластину нужно разрезать размером около 10×21 см вместе с алюминиевой пластиной.
После этого вам понадобиться 4 кусочка алюминиевой пленки размерами около 4×1 см для установления сервоприводов на место и поддержки частей из двух алюминиевых пластин 9×4 см. После вырезания этих кусков, можно соединять части вместе.
1 – алюминиевая пластина 10х21 см.
Шаг 4. Сборка частей вместе:
Для основы робота нам нужно четыре небольшие части 4х1 см. Они должны быть согнуты в размере около 1 см с одной стороны пластины, формируя L-образный кусок. В нижней части этого куска нужно сделать отверстия. Они должны быть расположены ближе к середине L-куска.
Верхняя часть L-пластины также должна иметь два отверстия, просверленные и распределены отдельно настолько, чтобы соответствовать сервоприводам.
Отверстия должны быть размещены на нижнем металлическом листе (10×21 см) одинаково по отношению друг к другу так, чтобы держать сервопривод на месте. Он будет находиться на задней части основы.
Установите два L-куска на расстоянии 3,5 см и 8,5 см от задней части основы. Они также должны быть на расстоянии около 1 см, так что сервопривод может поместиться свободно, немного выступая за края пластины.
Теперь закрепите куски на месте, и вы получите начальную стадию тела робота.
1 – L-образный алюминиевый кусок.
1 – сервопривод отлично помещается между алюминиевых пластинок.
Шаг 5. Задняя часть тела робота:
Для задней части тела робота нам необходимо создать немного места для лезвия с алюминиевыми обрезками 9х4 см. Нам нужно согнуть всего один см этих частей на обеих сторонах в форме U или C, так чтобы нижняя часть была соединена с основой, а верхняя часть должна соединяться с крышкой тела робота. Два отверстия должны быть расположены равномерно на верхней части, а два остальных отверстия – на нижней части в форме С.
Другие два отверстия должны быть расположены на действующей металлической пластине на одной линии с основой двух пластин в форме U или C.
Эти куски должны быть размещены на крае другой стороны основы и прикреплены заклепками на нужном месте.
Для последней части вам необходимо соединить алюминиевый кусок 10 х 4 см и основу, чтобы она вместилась вокруг двигателя с немного места на конце. Это позволяет изогнутый конец соединять с верхней частью алюминиевой части, оставляя место для двигателя. Для этого нужно просверлить отверстия на задней части верхней пластины, а другие отверстия на конце металлического листа, чтобы он мог надежно держаться на крышке.
1 – кусок на конце пластины.
1 – задняя часть тела робота с огромным вырезом для лезвия.
1 – держатель для двигателя; 2 – небольшое отверстие для болта на крышке.
1 – деталь в форме вопросительного знака; 2 – место на конце части.
Шаг 6. Передняя часть тела робота:
Теперь вам нужно сделать переднюю часть тела, это очень легко сделать, используя два навеса, они будут размещаться на другой стороне передней части основы. На основе нужно просверлить отверстие, где вы увидите отверстия на навесах. Если вы это сделали, нужно закрепить навесы с помощью заклепок, и у вас выйдет нижняя часть тела робота.
1 – навесы на конце нижней части тела робота; 2 – заклепанно на месте.
1 – законченная нижняя часть робота.
Шаг 7. Верхняя часть тела робота:
Для верхней части необходимо вырезать лист алюминия около 21×10 см для задней части с помощью ножниц для резки жестких материалов. Прямоугольник необходимо вырезать так, чтобы лезвие смогло поместиться удобно внутри, с большим зазором.
Передняя часть должна быть настолько отмеряна, чтобы отверстия могли стать местами для навесов, а навесы смогли поместиться на другой стороне. Это позволит верхней части качаться при открытии и закрытии. Просверлите 4 отверстия для навесов и закрепите их с помощью заклепок.
С держателем для мотора, собранным раньше для основной части, найдите, где отверстие сочетается с конечной частью, так чтобы отверстие было создано на верхней части. Это используется, чтобы болт мог затянуться, и это усилит действие двигателя на крыше робота. С правильно расположенным отверстием вы можете закрепить навесы на верхней части основы.
4 отверстия также необходимы, чтобы верхняя часть могла соединяться с другими деталями. Болты должны быть установлены, чтобы соединить эти части вместе.
1 – навесы соединены заклепками с верхней частью; 2 – Отверстие для крепления болтов, используемых для двигателя.
1 – большой разрез для лезвия.
1 – отверстие нужно закрепить болтом, чтобы держать двигатель, который помещается на части справа; 2 – отверстия, чтобы соединить болты с верхней частью.
Шаг 8. Электроника:
Теперь, когда основной корпус робота готов, нужно установить электронику, чтобы робот смог двигаться. Первую часть нужно соединить с сервоприводом и L-образным куском на основе. Лучше использовать шурупы от сервопривода, хотя также вместо этого можно использовать болты.
Эту часть нужно соединить с каналами 1 и 2 приемника, а также батареями приемника. Все это нужно приклеить к основе робота.
1 – сервоприводы с колесами, прикрепленными к L-части;
1 – сервоприводы должны подсоединяться к этом.
1 – батареи; 2 – сервоприводы, соединенные с батареями.
Шаг 9. Оружие:
Вы можете выбрать любое оружие. В данном примере используется лезвие-пила, подключенное к двигателю. Это, конечно, не самое лучшее оружие, но оно работает на достаточно высокой скорости. Для того, что бы его установить, нужно приклеить два пластмассовых куска вокруг большого отверстии на лезвие, используя суперклей.
Небольшое отверстие нужно сделать посредине пластмассового куска, где соединяется двигатель. Двигатель поместите на держатель, установленный на основе.
1 – лезвие-пила; 2 – запасной пластиковый кусок для соединения двигателя.
1 – двигатель соединен с лезвием.
1 – двигатель помещен в держатель.
Шаг 10. Фиксация проводов:
Двигатель можно легко зафиксировать проводами, соединив всего два провода с батареей и переключателем. Это будет означать, что когда переключатель поворачивается, двигатель начинает вращаться, а вместе с ним и лезвие. Если повернуть другой переключатель на приемнике, это позволит колесам поворачиваться с помощью передатчика.
1 – батареи; 2 – переключатель; 3 – двигатель с лезвием.
Шаг 11. Заключительная часть:
Наконец разместите болты в задней части, чтобы держать верхнюю часть должным образом, а также для моторной части, так чтобы двигатель получал импульсы верхней части основы. Это в значительной степени завершает BattleBot. Теперь можете наблюдать, как робот двигается вперед и уничтожает предметы на своем пути. При желании можно добавить микроконтроллер и запрограммировать робота на более сложные действия.
Собрать собственного робота — это мечта чуть ли не каждого мальчишки. Можно вспомнить и повальное увлечение роботами в Советском Союзе, особенно в 70-80 годах, и попытки создать крутых терминаторов после одноимённого фильма, и даже целые турниры, где роботы сражались за первенство, уничтожая друг друга на арене. В общем, роботы увлекали людей со дня сборки первой модели.
И если раньше для создания робота требовались большие деньги, много времени и сил, то теперь их сборка представляет собой конструктор. Ты устанавливаешь детали на платформу, заливаешь код на плату (готовый или самописный — зависит от твоих навыков в программировании и того, что ты ждёшь от робота), и вот, готовый терминатор, который будет служить тебе верой и правдой.
Звучит несложно. Но это только на словах. На деле же для сборки робота, а не радиоуправляемой игрушки, умеющей ездить только вперёд и назад, нужно много разных деталей. В этой статье мы расскажем тебе о том, как собрать простого робота из недорогих деталей.
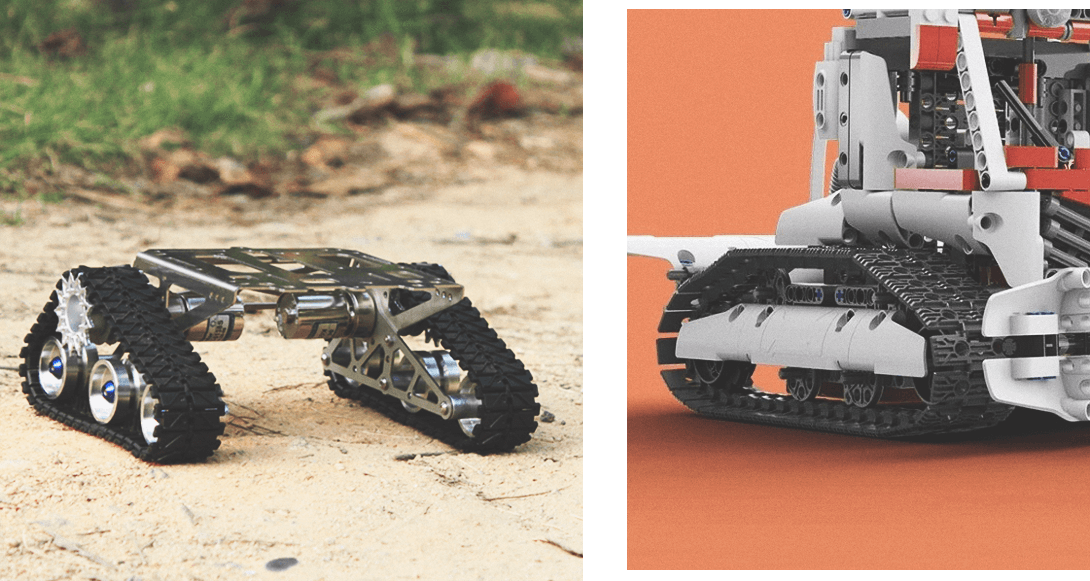
Базой любого робота является его подвижная часть. База может быть колёсной или гусеничной, но мы рекомендуем именно гусеничную. Такая база имеет лучшую проходимость, нежели колёсная, может поворачиваться на месте, а также более устойчива на неровной поверхности. Некоторые при сборке робота на гусеничной базе покупают игрушечный танк, разбирают и оставляют только базу, на которую крепят плату и другие детали. Это вариант неплохой, но затратный. Проще и дешевле купить гусеничную базу. Пример такой базы — пластина для Rover. Ссылка на неё ниже. Плюс этой базы в том, что на ней закреплено пластиковое основание, которое позволяет легко закрепить плату микроконтроллера Arduino, драйвер двигателей, элементы питания и датчики. Это делает возможным быстро собрать робота без необходимости разметки и сверления.
Платы

Часто в качестве основной платы выбирают «Arduino». Они простые в монтаже, достаточно мощные и надёжные. Но железо не ограничивается только одной платой, и для функционирования робота требуются драйверы двигателя, микросхемы, транзисторы — в общем, много сложных деталей.
Для твоего первого робота мы рекомендуем набор «Ардуино ДВ», ссылка на который будет ниже. В этом наборе очень много деталей, которые позволяют создать робота, не задумываясь о том, что тебе ещё нужно докупить для его нормального функционирования. В комплекте идет плата «Ардуино» UNO R3, макетная плата МВ-102, реле, датчики наклона, огня, температуры, влажности и уровня воды, шаговый двигатель, драйвер шагового двигателя, резисторы от 220 Ом до 10 кОм, светодиоды, тактовые кнопки, зуммеры, фоторезисторы, индикаторы, серводвигатель, ИК-приёмник, ИК-пульт, джойстик, LED матрица, LCD экран и другие детали. В наборе доступно 33 урока по сборке робота.
Кстати, покупать такие наборы удобнее, чем заказывать отдельные детали. Во-первых, в комплекте есть всё необходимое. Во-вторых, цена на 40% ниже, чем если бы ты покупал детали по отдельности. И в-третьих, проверенные детали. К комплекту «Ардуино ДВ» можно докупить дополнительные модули и датчики, сделав робота более функциональным. Лучший выбор для новичка.
Дополнительные датчики

Чтобы твой робот не бился об стены и другие преграды, его нужно оснастить датчиками препятствия. Существуют датчики столкновений, датчики линий, инфракрасные датчики, ультразвуковые дальномеры и другие датчики. Также, чтобы сделать робота умным, можно оснастить его датчиками движения и освещения, которые позволят ему ориентироваться на местности, объезжая не только статичные, но и динамичные объекты. Рекомендуем устанавливать минимум два датчика препятствий на передней части робота. Желательно установить ещё два датчика и в задней части. Помни: чем больше датчиков, тем лучше.
Питание

От качества системы питания будет зависеть продолжительность функционирования робота на одном заряде. Основной деталью является блок питания. Рекомендуем выбирать блок питания с входным и выходным фильтром от электромагнитных помех, защитой от превышения выходного напряжения, потребляемого тока и короткого замыкания на выходе. Это защитит робота даже при скачках напряжения.
Далее от блока питания ток поступает на платы и батареи. Для того чтобы робот был автономным, необходимо установить блок для батареек. Блоки бывают как компактными, для небольших круглых батареек, так и массивными, в которые устанавливается 10 батареек АА . Помни, что чем больше блок для батареек, тем больше вес робота. Если ты собираешь компактного робота, то лучше выбрать блок на 2 батарейки.
Также вместо батареек ты можешь установить блок питания, защищённый от воздействия влаги и солнечного света. Блок питания подойдёт в случае, если ты собираешься управлять роботом на улице.