Содержание
Для измерения расстояния используются различные датчики и устройства: оптические и ультразвуковые датчики, оптические сканеры, линейные и проволочные энкодеры. Такое разнообразие устройств измерений вызвано тем, что различные производственные задачи требуют различных технологий и принципов измерений.
Оптические датчики направляют световой пучок и принимают информацию об удаленности предмета. Оптические датчики расстояния представляют собой широкую номенклатуру приборов, среди которых выбрать нужную модель, порой, оказывается довольно сложно. Чтобы упростить задачу выбора правильного датчика расстояния, в первую очередь, необходимо определить два критерия: диапазон измерений и точность измерений. Все оптические датчики используют один из двух принципов: измерение времени прохождения луча (от объекта или рефлектора) или принцип геометрической триангуляции. Отсюда – разделение оптических датчиков на три подгруппы:
| Тип датчика | Оптические датчики расстояния | Датчики с отражателями | Оптические сканеры, датчики смещения |
| Принцип работы | измерение времени прохождения луча | измерение времени прохождения луча | принцип геометрической триангуляции |
| Источник сигнала | лазер | ИК диод, лазер | лазер, красный светодиод или ИК диод |
| Измеряемое расстояние | среднее | большое | малое |
| Точность измерений | средняя | средняя | максимально высокая |
| Серии датчиков SICK | DT60, DS60, DME3000-2, DS500, DT500, DMT10 | DL60, DS60, DME3000-1, DME5000, DML40 | OD, OD HI, OD MAX, OD Value, Profiler, DT2, DT10 |
Если требуется датчик расстояния с высокой точностью измерений, до нескольких миллиметров или даже микрометров, ваш единственный выбор – датчик смещений (displacement sensors).
Displacement sensors (дословно "датчики сдвига, смещения") – это датчики, используемые в автоматизированных процессах производства для бесконтактного высокоточного измерения расстояния в диапазоне нескольких десятков миллиметров (от 24 до 700 мм) с максимальной точностью (до 2 мкм). Такие датчики измеряют профиль, диаметр и толщину объектов, контролируют рабочие процессы и выполняют функции контроля качества. В линейку датчиков расстояния SICK входят следующие серии: OD , OD HI , OD MAX , OD Value , Profiler .
Измерения в шкале ММ
Датчики расстояния SICK мгновенно фиксируют самые минимальные отклонения, извилины или неровности – даже в диапазоне мкм. Поэтому такие датчики особенно актуальны для производств, где высочайшее качество продукции ставится во главу угла, где безопасность устройства зависит от точности и ровности поверхности составляющих его компонентов. Другие сферы применения: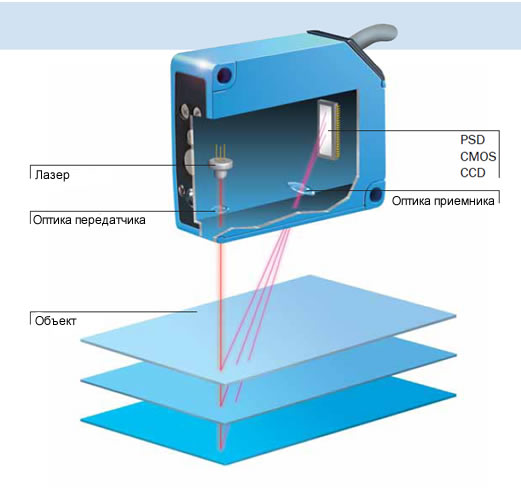
– контроль качества, тестирование продукции
– позиционирование объекта в процессе производства
– сортировка продукции.
Технология производства датчиков расстояния
Конструкция датчиков расстояния разработана для реализации двух задач, выполняемых датчиками: максимальная точность измерений и высокая скорость обработки данных при измерениях в диапазоне нескольких миллиметров. В конструкции датчиков расстояния SICK использован триангуляционный метод измерения (в оптических датчиках на большие расстояния используется метод измерения скорости возврата луча). Световой пучок направляется на поверхность тестируемого объекта (источником света может быть, например, лазерный диод). В корпусе датчика установлена оптика приемника, которая принимает отраженные лучи на светочувствительном элементе. В зависимости от положения отраженного луча и известной геометрии определяется расстояние до тестируемого объекта.
Оптика приемника: PSD, CMOS, CCD
Различают три типа оптика приемника датчика смещения: PSD, CMOS и CCD.
 PSD – Position Sensitive Devector, это фотодиод со светочувствительным элементом в форме полоски. Коэффициент двух выходных токов указывает на положение луча на поверхности диода. Основные характеристики PSD технологии:
PSD – Position Sensitive Devector, это фотодиод со светочувствительным элементом в форме полоски. Коэффициент двух выходных токов указывает на положение луча на поверхности диода. Основные характеристики PSD технологии:
– относительно хорошее разрешение на однородных и размытых отражающих материалах
– недорогая экономичная технология изготовления
– портативность габаритных размеров датчиков
– относительно высокая скорость измерений
Поэтому PSD датчики рекомендуется применять для решения несложных задач, где стоимость является критичным моментом.
CMOS – Complementary Metal Ox />Основные характеристики CMOS технологии:
– очень высокое разрешение и точность при работе с любыми материалами (матовыми, блестящими, светлыми и темными поверхностями)
– высокая надежность измерений даже при сильной контрастности (отсутствие "размытых" областей по сравнению с CCD технологией)
– высокая скорость измерений
– недорогое решение
– позволяет создавать сравнительно портативные корпуса датчиков
Т.о., CMOS датчики – это оптимальная технология оптических датчиков расстояния для решения сложных производственных задач.
CCD – Charge-Coupled Device, это полупроводниковый элемент из собранных в линию фотодиодов. Последовательное считывание данных о яркости позволяет определить местоположение светового луча. Преимущества CCD элемента:
– очень высокое разрешение и точность при работе с любыми материалами (матовыми, блестящими, светлыми и темными поверхностями)
– относительно высокая скорость измерений
– фотореалистическое сканирование света
Т.о., CCD технология идеально для цифровой фотографии.
Самые первые бесконтактные датчики расстояния выдавали информацию только лишь о наличии или отсутствии предмета перед датчиком в виде дискретного сигнала ON/OFF. Эти простейшие датчики до сих пор находят огромное применение в различных областях промышленности. В то же время для решения более сложных задач автоматизации технологических процессов инженерам нужна дополнительная информация о положении объектов измерения. Для этих целей были разработаны датчики, позволяющие определять расстояние до объекта и его положение с помощью аналогового выхода, сигнал на котором пропорционален расстоянию до измеряемого объекта. Такие датчики могут быть использованы во множестве применений, таких как определение расстояния до объекта, измерение толщины, измерение наклона и деформации, измерение профиля изделия, центровка и измерение диаметра.
Датчики для измерения расстояния могут использовать различные принципы измерений: индуктивный, ультразвуковой или оптический, однако все они имеют электрический выходной сигнал, величина которого пропорциональна расстоянию до измеряемого объекта. В таблице 1 представлены основные типы аналоговых бесконтактных датчиков для измерения расстояний и их основные особенности.
 |
 |
 |
 |
 |
| Индуктивные | Ультразвуковые | Оптические | ||
| Триангуляционные | Радарные | |||
| Расстояние | 0 – 20 мм | 10 – 10.000 мм | 10 – 1.000 мм | 10 – 500.000 мм |
| Разрешение | 0,1 мкм | 0,1 мм | 1 мкм | 0,5 мм |
| Точность | 1 мкм | 0,2 мм | 2 мкм | 2 мм |
| Линейность | 0,4% – 5% | 0,5% | 0,05% – 1% | 0,001% |
| Время | 0,3 мс | 20 мс | 1 мс | 1 мс |
Индуктивные датчики. Индуктивные датчики расстояния определяют расстояния до проводящих металлических объектов, таких как сталь, алюминий, латунь. Поскольку принцип работы индуктивных датчиков основан на определении токов взаимной индукции, такие датчики очень устойчивы к воздействию неметаллических предметов и помех, таких как, например, пыль или машинное масло. Современные технологии позволяют создать индуктивный датчик с аналоговым выходом имеющей диаметр всего 6 мм и измеряемое расстояние 2 мм. Такие датчики с высоким разрешением и быстрым временем отклика находят применение в большинстве высокоскоростных задач.
Вместе с тем, несмотря на прекрасную точность, разрешение и время отклика, существенная нелинейность, составляющая 3% – 5%, представляет определенную проблему. Что бы преодолеть это некоторые производители определяют выходной сигнал датчика как полиномную функцию, математически описывающую сигнал, и тем самым дают возможность запрограммировать с помощью такой функции большинство современных контроллеров для более точного алгоритма измерения. Типичная функция, описывающая выходной сигнал аналогового индуктивного датчика в зависимости от расстояния, представлена ниже:
Где: Iвых = выходной ток
Измеряемое расстояние = 0-2 мм, 0-20 мА (Iвых)
Коэффициенты функции имеют следующие значения:
a = -0.144334; c = -0.00782; e = -7.27311 ? 10-6; b = 0.151453; d = 0.00040
Тем самым, например, на расстоянии 0,4638 мм выходной сигнал будет 5 мА. Проблемы с линейностью могут быть так же решены с использованием интегрированного в датчик микропроцессора. Такой метод позволяет произвести линеаризацию выходной характеристики датчика и существенно снизить нелинейность. Например, индуктивный датчик диаметром 12 мм и расстоянием измерения 0 – 4 мм., со встроенным микропроцессором имеет линейность лучше, чем 0,4%.
Ультразвуковые датчики. Принцип действия ультразвуковых датчиков расстояния основан на излучении импульсов ультразвука и измерении, пока звуковой импульс, отразившись от объекта измерения, вернется обратно в датчик. При этом достигается разрешения до 0,2 мм.
Благодаря тому, что пьезорезистивный преобразователь может служить как излучателем, так и приемником ультразвуковых импульсов, появляется возможность создать ультразвуковые датчики расстояния с одним преобразователем. Такой преобразователь сначала излучает короткий ультразвуковой импульс. Одновременно с этим, в датчике запускается внутренний таймер. Когда отраженный от объекта ультразвуковой импульс вернется обратно в датчик, таймер останавливается. Время, прошедшее между моментом излучения импульса и моментом, когда отраженный импульс вернулся в датчик, служит основой для вычисления расстояния до объекта. Полный контроль за процессом измерения производится с помощью микропроцессора, обеспечивающего высокую линейность измерений. Наиболее важными особенностями применений ультразвуковых датчиков служит их возможность измерять расстояния до таких сложных объектов таких как, например, сыпучие вещества, жидкости, гранулы, прозрачные или напротив сильно отражающие поверхности. В дополнение ультразвуковыми датчиками можно измерять сравнительно большие расстояния, при этом, сохраняя их небольшие размеры, что может быть существенно для ряда применений.
Однако и ультразвуковые датчики имеют ряд ограничений. Прежде всего, это пена и другие объекты, сильно поглощающие ультразвуковые колебания. Такое поглощение сильно уменьшает измеряемую дистанцию. Сильно изогнутые поверхности так же снижают расстояние и точность измерений, поскольку рассеивают ультразвуковые колебания в различных направлениях. Ультразвуковые датчики излучают импульс в виде широкого конуса, что так же ограничивает возможность измерения расстояния до небольших объектов, увеличивая уровень помех от других объектов, которые так же могут находиться в поле зрения датчика. Некоторые ультразвуковые датчики имеют конус с углом всего 5 градусов. Это позволяет использовать их для измерения намного меньших объектов, например таких, как бутылки или ампулы.
Оптические датчики. Существует множество различных способов измерить расстояние до предмета с помощью оптики: например лазерные интерферометры, датчики с рассеянным отражением света и оптические датчики радарного типа. Каждый из видов датчиков имеет свои сильные и слабые стороны. Лазерные интерферометры имеют большой диапазон измерений и точность несколько нанометров, однако, эти приборы очень дорогие и сложные в эксплуатации. Датчики с рассеянным отражением и аналоговым выходом могут измерять расстояния в широких пределах, однако поскольку они работают с отраженным светом, то могут быть проблемы с измерением расстояний до окрашенных или отражающих объектов. Оптические датчики радарного типа, преимущественно лазерные, могут измерять большие расстояния, однако принцип их работы, основанный на измерении времени распространения света от датчика до объекта и обратно, позволяет измерять с ограниченным разрешением в 2 – 3 мм.
Подавляющее большинство задач по измерению в промышленности приходится на диапазоны от долей микрон до нескольких десятков метров. При этим датчики должны работать с объектами далекими от идеальных: малого размера, имеющих различный цвет, сложную структуру поверхности и перемещающихся с высокой скоростью. Для таких целей наиболее подходят лазерные датчики расстояния, работающие по принципу оптической триангуляции.
Рисунок. Принцип работы оптического датчика расстояния
На рисунке показан принцип работы оптического датчика расстояния. Лазер посылает через линзу луч, который отражается от объекта и фокусируется на линейке из фотодиодов, которая прообразует световой сигнал в электрический. Всякое изменение расстояния до объекта вызывает изменение угла отраженного луча и, следовательно, позиции, которую отраженный луч занимает на линейке фотодиодов. Микроконтроллер обрабатывает сигнал от линейки фотодиодов и преобразует его в аналоговый электрический сигнал.
Наиболее важное качество таких датчиков расстояния состоит в сочетании высокой точности измерения и больших измеряемых расстояниях. Большинство производителей предлагают датчики с разрешением от 1 мкм до 1мм. Однако высокая точность возможна только на относительно коротких расстояниях. Так что, например, точность в 1 мкм на расстояниях в 1 метр получить вряд ли удастся.
Для снижения влияния шумов все лазерные датчики расстояний позволяют проводить интегральные или усредненные измерения. При этом производится множество измерений расстояния до объекта и результат потом усредняется, тем самым повышается точность измерений. Однако большая точность требует большого количества измерений, увеличивая при этом общее время измерения. Так, например, что бы обеспечить точность в 1 мкм типичное время измерения составляет порядка 0,1 сек.
Правильный выбор датчика. Для того, что бы правильно выбрать подходящий датчик расстояния, необходимо ответить на 7 вопросов:
Из чего состоит объект измерения? Какое расстояние до объекта? Какая требуется точность? Насколько быстро движется объект? Какие существуют внешние неблагоприятные условия? Какой тип выходного сигнала необходим? Насколько ограничено пространство для установки датчика?
Получив ответ на эти вопросы, и обладая знанием принципов работы индуктивных, ультразвуковых и оптических датчиков расстояния, Вы сможете наилучшим образом выбрать необходимый датчик.
Идею определять расстояние до предметов с помощью звука человек позаимствовал у природы. Летучие мыши, дельфины и некоторые другие животные, посылая звуковые сигналы и принимая отраженные, ориентируются в пространстве. По тому же принципу работает ультразвуковой датчик. Излучая звуковые волны ультравысокой частоты, сканирует пространство перед собой, и по отраженному сигналу обнаруживает объекты и вычисляет расстояние до них.
Принцип действия
Датчики ультразвукового излучения используются для обнаружения объектов, контроля их движения и измерения расстояний до них. Принцип действия состоит в следующем. Прибор излучает звуковые колебания с частотой больше 20000 герц. При встрече с объектом они отражаются, попадают в приемник, и фиксируется. Электронная схема отсчитывает время, которое прошло с момента импульса до момента приема эха. Расстояние высчитывается по формуле: R= tV/2, где t – время между импульсом и приемом эха, V — скорость звука. Произведение делится на 2, потому что звуковые волны проходят путь, равный двойному расстоянию между объектом и датчиком. Скорость звука в различных средах неодинаковая: в воздухе это 331 м/сек, в дереве –1500, в воде – 1430.
Расстояние, на котором обнаруживаются объекты – до 8 метров, при условии, что у них твердая и гладкая поверхность. Если они изготовлены из мягкого, пористого материала, поглощающего звук – расстояние сокращается.

Описание и назначение
Датчик ультразвука — техническое устройство, которое состоит из нескольких основных частей:
Излучатель
Наиболее распространены два вида излучателей: магнитострикционный и пьезоэлектрический.
Магнитострикционный — ультразвуковые колебания возникают при изменении линейных размеров ферромагнетика в переменном магнитном поле.
- надежность — не менее 10 000 часов непрерывной работы;
- коэффициент полезного действия 80%.
- сложная конструкция;
- необходимо водяное охлаждение.
Пьезоэлектрический – ультразвуковые волны возникают при изменении линейных размеров диэлектрика, выполненного в виде мембраны, в переменном электрическом поле.
- простота конструкции;
- получение ультразвука широкого частотного диапазона;
- незначительные размеры.
- низкая мощность излучения.
- В ультразвуковых датчиках используются в основном пьезоэлектрические излучатели.
Приемник
Пьезоэлектрический эффект имеет обратную сторону: ультразвук, попадая на пьезоэлемент, вызывают в нем колебательные движения, в результате которых возникает электрический ток. На этом принципе работают датчики ультразвукового излучения: возникновение тока в электрической цепи говорит о появлении объекта перед прибором.
По конструкции приемо-передающей системы выделяют два типа датчиков:

В данной схеме передатчик и приемник — единый элемент. Мембрана, излучив ультразвук, принимает отраженный сигнал и формирует электрический сигнал. Это упрощает конструкцию, уменьшает размер. Однако есть недостаток. Мембрана после излучения не может сразу перейти к приему – необходимо время, чтобы колебания погасли. Этот период получил наименование «мертвое время». Расстояние до приемника, ближе которого отраженный объектом сигнал будет попадать на мембрану в мертвое время, называется слепой зоной. На таком расстоянии прибор не фиксирует сигнал, и объект не обнаружиться. С этим явлением борются. При помощи настроек и специальных режимов работы удается уменьшить слепую зону в 2 раза, но полностью устранить ее невозможно.
- с двумя головками

Передатчик и приемник – отдельные части конструкции. У прибора нет слепой зоны, однако требуется настройки элементов для совпадения частоты передачи и приема сигнала.
Назначение датчика ультразвука — фиксация появления объектов в зоне действия, измерение расстояния до них, подсчет перемещающихся в зоне обзора предметов, определения уровня сыпучих грузов и жидкостей. При выполнении этих задач он может работать в темноте, в условиях задымленности, запыленности, повышенной влажности, высоких и низких температур. Прибор нечувствителен к звуковым сигналам слышимого диапазона. При необходимости легко регулируется на другие измерительные диапазоны.

Примеры
Ультразвуковой датчик Lego Mindstorm EV 3
Входит в робототехнический конструктор Lego Mindstorm EV 3. Основная функция — измерение расстояния до объектов, находящихся в поле зрения сенсора.
Выполнен по схеме с двумя головками. Одна – пьезоэлектрический преобразователь-излучатель AW8T40, другая — пьезоэлектрический преобразователь-приемник AW8R40. Головки размещены в общем корпусе вместе с микроконтроллером и микросхемами усиления сигнала. Датчик через кабель подключается к центральному микрокомпьютеру EV 3.
- Частота излучения – 40000 герц.
- Дистанция обнаружения — до 255 см.
- Слепая зона — 3 см.
- Точность измерения — +/- 1 см.
- Вес – 0,05 кг.
Лучше обнаруживает объекты с гладкой, хорошо отражающей звуковые волны поверхностью. Объекты, покрытые мягкой тканью, могут не обнаруживаться датчиком. Затруднено фиксирование объектов сферической формы, либо имеющих наклонные поверхности.

Работает в двух режимах:
- режим определения расстояния;
- режим обнаружение другого ультразвукового излучателя.
Датчик сконструирован для использования в наборе Lego Mindstorm EV 3 и автоматически определяется программным обеспечением микрокомпьютера. Устанавливается на роботах, собранных из элементов набора.
Ультразвуковой датчик HC-SR04
Датчик также выполнен по двухголовочной схеме и состоит из пьезоэлектрического преобразователя-излучателя TCT40-16T, и пьезоэлектрического преобразователя-приемника TCT40-16R. Они размещены на плате, размером 45х25 мм, с обратной стороны которой смонтированы микросхемы и другие элементы. Внизу платы выведены четыре контакта: 2 – питания, 2 – цифровые вход и выход.
- Напряжением — 5 В.
- Частота ультразвука — 40 кГц
- Дистанция обнаружения — до 400 см.
- Слепая зона – 2 см.
- Минимальный разрешение – 0,3 см.
- Эффективный угол наблюдения — 15°.
- Вес- 8,3 гр.

Обычно он интегрируется с аппаратной платформой Arduino, но может подключаться и к другим микроконтроллерам. Благодаря открытой архитектуре и программному коду Arduino, HC-SR04 широко используется в любительских и профессиональных проектах: конструирование робототехники, создание измерительных приборов и сторожевых систем и т.п.
Работает только в активном режиме – не определяет посторонние источники ультразвука.
Востребованности прибора способствует цена – около 100 рублей.
Применение сенсоров ультразвукового излучения в робототехнике
Главная задача, решаемая в робототехнике с помощью датчиков этого вида — ориентирование робота на местности, предотвращение столкновений и обеспечение обхода препятствий.
Достоинства систем ориентации, построенных на ультразвуковых датчиках:
- цена;
- проста в изготовлении, так как монтируется из легкодоступных элементов;
- при интегрировании в роботизированные устройства не требуется менять схему управления робота;
- универсальность;
- нечувствительность к неблагоприятным факторам окружающей среды: задымленность, запыленность, отсутствие света, высокая влажность.

Учитывая незначительную дистанцию действия сенсоров в воздушной среде, их применяют в пространствах ограниченного объема искусственного или естественного происхождения, с твердыми и ровными поверхностями. Это обеспечивает получение устойчивого эхо-сигнала. В таких условиях информация ультразвукового дальномера объективна. Для кругового обзора необходимо увеличение количества датчиков. Определение расстояние до преграды в движении, остановка и объезд достигается программными средствами.
Ультразвуковые сенсорные системы широко применяются в подводных роботах, являясь основными средствами контроля окружающего пространства. Здесь в качестве гидроакустических преобразователей используют магнитострикционные излучатели, обладающие большой акустической мощностью.
Другие сферы применения
Ультразвуковые сенсоры применяют в различных областях:
- Для контроля физико-химических характеристик веществ. Принцип действия основан на сравнения скорости звука в проверяемом веществе с эталонным – расхождение указывает на изменения в веществе.
- Для контроля расхода жидких веществ в трубопроводах. Принцип действия основывается на сравнении скорости ультразвуковых колебаний по направлению потока и против него. Метод не требует помещение датчика внутрь трубопровода — сенсор крепится с наружной стороны.
- Для определения уровней жидких или сыпучих материалов.
Принцип действия основан на отражении ультразвука, посылаемого датчиком, от границы раздела «газ – жидкий или сыпучий материал». При понижении уровня время прохождения колебаний меняется, и прибор сигнализирует об этом.
- Для охраны помещений. Принципов действия несколько:
- охранный датчик испускает ультразвуковое излучение. При появлении в зоне обнаружение объекта отраженный сигнал принимается датчиком. Далее он действует по выбранному алгоритму: включает сирену, подает сигнал на пульт охраны и т.д.;
- сигнал охранного датчика попадает на приемник, расположенный на некотором расстоянии. При прохождении объекта между приемником и излучателем сигнал прерывается, и сенсор действует по приведенному алгоритму.
Для надежности обычно применяют несколько ультразвуковых охранных датчиков, работающих на разных принципах.
- Пожарная безопасность. Ультразвуковой пожарный извещатель действует по тому же принципу, что и охранный. Реагирует не на объект, а на движение нагретого огнем воздуха. Отличается высокой чувствительностью. Измерители температуры газов и пожарные сигнализаторы, основанные на изменении скорости распространения при изменении температуры среды или появления дыма.
Ультразвуковой контроль качества материалов и изделий. Принцип действия основан на отличии скорости звука в разных средах и отражении ультразвука от границы сред. Обнаруживает точное расположение внутренних дефектов на глубине нескольких метров.
- Медицина. Проведение ультразвукового исследования для диагностики внутренних патологий. Принцип работы датчика основан том, что скорость прохождения ультразвуковых волн в тканях человека. Отраженный сигнал меняет длину волны в различных тканях организма. Визуализация сигнала на экране прибора дает возможность увидеть строение внутренних органов человека.