Многие устройства, работающие в электрических цепях, требуют проведений точных измерений в режиме реального времени. От точности этих замеров зависит многое: качество процессов регулирования в схемах управления, надежная работа защиты, калькуляция при подсчете потребляемой мощности в электроустановках и т.д. Обычно для таких измерений используют специальные приборы, которые входят в состав основной схемы. К примеру, датчик тока широко используется при работе многих устройств. Он может быть реализован на самых разных элементах, в зависимости от того или иного схемного решения. Остается неизменным только сам принцип его работы – в соответствии с заложенным в него коэффициентом он преобразует сигнал с измерительного трансформатора или иного устройства в сигнал напряжения, который согласован с остальной частью схемы.
Несколько иначе обстоит дело, если мы имеем дело с постоянным или медленно меняющимся во времени параметром. Вышеописанный трансформатор в такой схеме работать не будет, так как на его выходе мы сможем получить только динамику измеряемого параметра. Обычно в таких схемах используется специальный шунт, с

Несколько иной принцип работы заложен в так называемый датчик тока Холла. Он измеряет напряженность магнитного поля, которое возникает по причине протекания тока в проводнике, и преобразует его в выходной сигнал по напряжению. Особенностью его работы является то, что он универсален и способен нормально функционировать в любых цепях. Такие датчики компактны и обладают хорошими эксплуатационными характеристиками.
Датчик тока предназначен для того, чтобы передать в систему автоматического управления сигнал, пропорциональный току тягового двигателя. По условиям электробезопасности система управления должна быть изолирована от силовой цепи электровоза. Поэтому в качестве датчика тока используют трансформатор постоянного тока (ТПТ), который состоит из двух ферромагнитных сердечников сечением S с одинаковыми обмотками, называемыми рабочими (рис.1). Число витков каждой рабочей обмотки обозначено wр, а ее сопротивление – rp . К обмоткам подведено переменное синусоидальное напряжение U, создающее переменный рабочий ток iр. Последовательно с обмотками, через выпрямительный мост включен резис-тор r. Падение напряжения ur = r · iр на этом резисторе является выходным сигналом датчика тока.
В отверстия сердечников пропущен силовой кабель, который образует входную обмотку датчика с числом витков w. По этой обмотке протекает ток I силовой цепи, называемый входным током.

На рис.1 показана также обмотка смещения с числом витков wсм, охватывающая оба сердечника.
Сердечники датчика выполнены из пермаллоя, или высокотекстурованной электротехнической стали. Характеристика перемагничивания этих материалов близка к прямоугольной; в упрощенном виде она показана на рис.2. Действующее значение синусоидального напряжения U, от которого питаются рабочие обмотки, выбирают так, чтобы при токе силовой цепи I = 0 амплитуда магнитной индукции в сердечниках Вmax была немного меньше индукции насыщения Вн.
U = 2 · 4,44 · f · wр· Вmax· S . (1)

При этом сердечники находятся в состоянии перемагничивания, соответствующем вертикальному участку кривой намагничивания (см. рис.2), магнитная проницаемость сердечников очень высока, а напряженность магнитного поля Н в сердечниках и ток намагничивания пренебрежимо малы. Условно можно принять положительным то направление индукции В, которое соответствует показанному на рис.1 направлению тока в рабочей обмотке iр. Поскольку рабочие обмотки обоих сердечников включены встречно, то положительные направления индукции в сердечниках будут противоположны; это показано на рис.1 стрелками.
При одновременном протекании переменного тока iр по рабочей обмотке и постоянного тока I по входной обмотке возможны два случая:
1. Намагничивающие силы входной и рабочей обмоток одного из сердечников направлены встречно.
Сердечник остается в состоянии перемагничивания. Напряжение на рабочей обмотке перемагничивающегося сердечника
uрп = rp · iр + wр · S · dB/dt.
Поскольку магнитная проницаемость сердечника при этом очень велика, то ЭДС – wр · S · dB/dt, индуктируемая в рабочей обмотке, имеет достаточную величину, чтобы поддержать в рабочей обмотке такое значение тока iр, при котором алгебраическая сумма намагничивающих сил входной и рабочей обмоток равна нулю:
∫H · dl = iр · wр – I · w = 0. (2)
Отсюда следует, что в процессе перемагничивания сердечника мгновенное значение рабочего тока остается неизменным и равным
iр = I · w/wр = const. (3)
2. Намагничивающие силы входной и рабочей обмоток складываются. Сердечник переходит в состояние насыщения, соответствующее одному из горизонтальных участков кривой намагничивания (см. рис.2). При этом магнитная индукция в сердечнике B = Bн остается постоянной независимо от величины токов iр и I в обмотках этого сердечника. Напряжение на рабочей обмо т ке насыщенного сердечника
где Ls – индуктивность рассеяния рабочей обмотки.
Поскольку рабочие обмотки двух сердечников соединены между собой встречно, то при I = 0 в каждый момент времени намагничивающие силы обмоток у одного из сердечников вычитаются, а у другого – суммиру-ются. Следовательно, когда один из сердечников перемагничивается, другой в это время находится в состоянии насыщения.
Рассмотрим процесс изменения магнитного состояния сердечников при работе датчика тока.
На рис.3,а показано синусоидальное напряжение, приложенное к цепи рабочей обмотки.

Пусть в некоторый момент времени ω · t = α первый сердечник начинает перемагничиваться, второй находится в состоянии насыщения. При этом ток в цепи рабочих обмоток, определяемый формулой (3), остается постоянным в течение всего процесса перемагничивания (рис. 3,б).
Напряжение u, приложенное к рабочей цепи, уравновешивается напряжениями на рабочих обмотках первого и второго сердечников и на резисторе r:
u = uрп + uрн + ur = (2rp + r) · iр + wр · S · dB’/dt + Ls · diр/dt. (4)
Падение напряжения на активных сопротивлениях рабочей цепи (2rp + r) · iрпоказано на рис.3,а. Ординаты заштрихованной площади соглас-но уравнению (4) равны wр · S · dB’/dtпоскольку diр/dt= 0. В момент време-ни ω · t = α u > (2rp + r) · iри dB’/dt >0. Магнитная индукция в сердечнике начинает изменяться от величины –Вн в сторону положительных значений (рис.3,в). Такое изменение B’ продолжается до момента времени t1, когда будет выполнено условие u = (2rp + r) · iр. Величина изменения индук-ции ∆B пропорциональна вертикально заштрихованной площади на интервале от α доω · t1(рис.3,а).
При t > t1 мгновенное значение напряжения продолжает снижаться к u ’ д.о, как это показано на рис.4 штриховыми линиями.
Характеристику датчика тока можно сместить вправо или влево, используя обмотку смещения. Если намагничивающая сила обмотки смещения совпадает по направлению с намагничивающей силой входной обмотки, характеристика управления смещается влево (положительное смещение) на величину ∆Iс (см. кривую 4).
∆Iс = Iсм · wсм/w. (13)
При встречном направлении намагничивающих сил характеристики смещаются вправо (отрицательное смещение). Возможность смещения характеристик позволяет использовать датчик тока в качество устройства сравнения (сумматора намагничивающих сил обмоток входной и смещения), а также для изменения знака коэффициента преобразования датчика. Обмотка смещения в этом случае выполняет функции задающего устройства.
Не нашли то, что искали? Воспользуйтесь поиском:
Контроль и измерение тока – это принципиальное требование для множества приложений, а также для схем защиты от перегрузок тока, импульсных источников питания, программируемых источников тока, зарядных устройств и др.
Датчики тока
Самый простой способ измерения тока – применить датчик постоянного тока , состоящий из резистора с незначительным сопротивлением, – шунта включенного последовательно с нагрузкой, где падение напряжения будет пропорционально протекающему току.
Этот метод, хотя и самый простой в реализации, требует более точного измерения, так как от непостоянной температуры зависит сопротивление шунта. К тому же этим способом невозможно организовать между измерителем и нагрузкой тока гальваническую развязку, необходимую в приложениях, так как питание нагрузки происходит благодаря высокому напряжению.
Недостатки измерения тока, часто встречающиеся при использовании резисторного шунта:
нагрузка не поступает напрямую на «землю»;
между схемой и нагрузкой измерения нет гальванической развязки;
нелинейность измерений, которая обусловлена из-за температурного дрейфа сопротивления резистора.
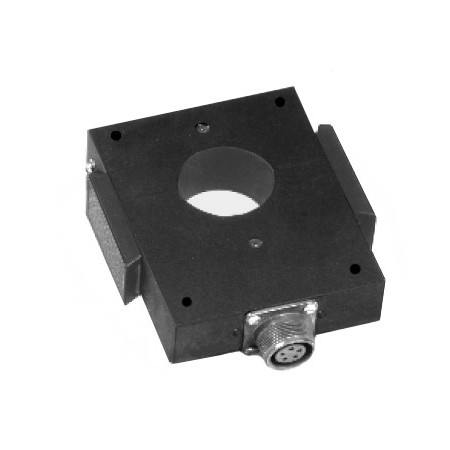
Для подобных измерений применяют прецизионный интегральный датчик тока Холла , к примеру, Allegro ACS712 (Рисунок 1). Этот прибор подключается к микроконтроллеру и передает данные о протекающем токе в проводнике. Принцип работы прибора основывается на простом эффекте Холла.

При возникновении магнитного поля на быстро движущиеся электроны начинает оказывать влияние сила Лоренца, которая искривляет путь движения электронов, следствие чего происходит перераспределение зарядов в элементе Холла.
Прибор ACS712 выпускается в SOIC 8-ми выводном корпусе и предназначен для поверхностного монтажа. Микросхема имеет встроенный датчик тока Холла , состоящего из малого напряжения смещения и медного проводника, расположенного на поверхности чипа. Во время протекания тока через этот проводник, создается магнитное поле, которое воспринимается встроенным кристаллом элемента Холла. Встроенная схема формирования сигнала повышает уровень напряжения для возможности измерения внешним АЦП.
На Рисунке 2 изображена схема подключения ACS712 к внешним устройствам. На выводах 1-4 образуется проводящий путь измерения тока, внутреннее сопротивление которого порядка 1.2 МОм. Прочность изоляции пробора составляет 2.1 кВ.

Любой АЦП имеет зависимость точности измерения и стабильности опорного напряжения. В применении микроконтроллерной техники, это напряжение часто выбирается из основного питающего. Поэтому для точных измерений нужно тщательно подходить к выбору источника опорного напряжения.
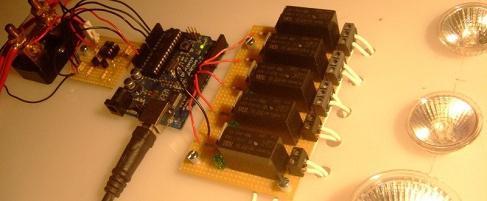
При подключении датчика тока в микроконтроллер заливается программа, основное тело которой можно видеть на Листинге 1.
void set (void) <
Serial. begin(2400);
>
void loop() <
<
float average = 1;
for (int i = 0; i++; i
Результирующие данные можно передавать через COM -порт или другие доступные интерфейсы.
Трансформаторы тока
В электроустановках переменного напряжения для измерения силы тока применяют токовые трансформаторы.
Основной класс трансформатора тока разделяется на восемь групп:
По назначению (защитные, лабораторные, измерительные и промежуточные);
По принципу установки (наружная, внутренняя установка, встроенные в машины и электрические аппараты, переносные и накладные);
По конструктивным особенностям первичной обмотки трансформатора (одновитковые, многовитковые, шинные);
По типу установки (опорные и проходные);
По исполнению изоляции (бумажно-маслянная, сухая, газонаполненная);
По ступеням трансформации и коэффициент трансформатора тока (одноступенчатые, каскадные), ВАХ характеристики;
По допустимому рабочему напряжению (до 1000 В и выше 1000 В);
Особые трансформаторы тока (пояс Роговского, нулевой последовательности).
Применение трансформатора тока повышает безопасность работы с контрольно-измерительными приборами, так как высоковольтные и низковольтные цепи имеют гальваническую развязку.
Первичная обмотка трансформатора включается последовательно в цепь измерения. Далее сигнал преобразуется во вторичный ток трансформатора тока . На первичной обмотке чаще всего располагают несколько витков провода большого сечения. Измерительные трансформаторы тока работают совершенно в других условиях, например, в случаях с силовыми трансформаторами. В торичный ток трансформатора тока имеет небольшие значения.
Принцип работы токового трансформатора иллюстрирован на Рисунке 3. Через силовую обмотку протекает ток. Вокруг контура формируется магнитный поток, передающийся через магнитопровод. После пересечения перпендикулярно расположенных обмоток, образуется ЭДС, под влиянием которой возникает вторичный ток трансформатора тока .

Промышленный трансформатор тока имеет подобный вид, как на Рисунке 4.

Подключение трансформатора тока по схеме полной звезды представлено на Рисунке 5. Данная защита реагирует на любые типы короткого замыкания. При КЗ на землю геометрическая сумма токов в реле будет сосредоточена в нулевом проводе. Поэтому реле в нулевом проводе может реагировать на утечки токов и короткое замыкание на землю .

Волоконно-оптические датчики тока
Волоконно-оптические датчики тока работают по принципу эффекта Фарадея. В процессе распространения ли ни й поляризованного света, сквозь оптические неактивные вещества наблюдается искривление угловой плоскости поляризации. Простой пример реализации данного датчика представлен на рисунке 6 .

На Рисунке 7 показан пример реализации системы использования волоконного датчика тока, работающий по протоколу МЭК 61850-9-2LE.

Узнайте условия разработки промышленной электроники, отправив запрос на [email protected]
Время выполнения запроса: 0,0027711391449 секунд.
