Возможны три режима работы двигателя при торможении:
1. Рекуперативное торможение, т.е. торможение с отдачей энергии в сеть Е>Uс. ЭДС направлена навстречу напряжению. Направление тока якоря совпадает с направлением ЭДС двигателя.
2. Торможение противовключением. Направление ЭДС и напряжения сети совпадают. Ток направлен согласно ЭДС.
3. Динамическое торможение Uс=0.
Следует отметить, что когда машина работает двигателем напряжение ЭДС и тока в этом режиме противоположно. Когда машина работает генератором с отдачей энергии в сеть, направление ЭДС и тока двигателя совпадают. В генераторном режиме, когда ток направлен навстречу напряжению, происходит отдача энергии в сеть.
1. Рекуперативное торможение.
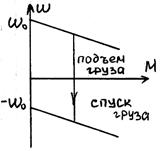
Этот вид торможения возможен только при скорости двигателя больше скорости w0 (w>w0) идеального холостого хода. Оно возможно в том случае, если на валу двигателя есть движущий активный момент.
Например: при случае спуска груза.
Рекуперативное торможение возможно и при регулировании скорости изменением напряжения на якоре двигателя, когда переход с более высокой скорости на более низкую.
 ;
;  ;
; 
М Мкз2 – торможение противовключения.
Дата добавления: 2016-02-09 ; просмотров: 4668 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
 При остановке и реверсировании двигателей постоянного тока (ДПТ) применяется электрическое (динамическое и противовключением) и механическое торможения. При динамическом торможении схема отключает обмотку якоря от сети и замыкает ее на тормозной резистор с одной или несколькими ступенями. Управление динамическим торможением производится с заданием времени или с контролем скорости.
При остановке и реверсировании двигателей постоянного тока (ДПТ) применяется электрическое (динамическое и противовключением) и механическое торможения. При динамическом торможении схема отключает обмотку якоря от сети и замыкает ее на тормозной резистор с одной или несколькими ступенями. Управление динамическим торможением производится с заданием времени или с контролем скорости.
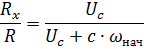
Для управления моментом ДПТ с заданием времени в режиме динамического торможения применяется узел схемы, приведенный на рис. 1, а, составленный для управления торможением ДПТ с независимым возбуждением с одной ступенью тормозного резистора R2.
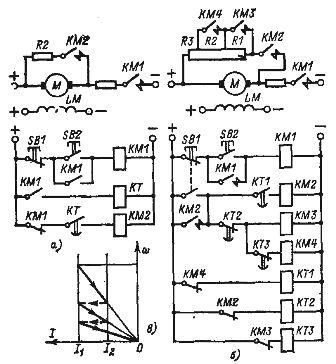
Рис. 1. Схема, осуществляющая одноступенчатое (а) и трехступенчатое (б) динамическое торможение двигателя постоянного тока с управлением по времени и пусковая диаграмма трехступенчатого торможения (в).
Команда на перевод ДПТ в режим динамического торможения в приведенной схеме подается от кнопки SB1. При этом линейный контактор КМ1 отключает якорь двигателя от напряжения сети, а тормозной контактор КМ2 подключает к нему тормозной резистор. Команду на отсчет времени процесса динамического торможения для реле торможения КТ подает линейный контакторам КМ1, выполняющий предыдущую операцию в схеме перед началом динамического торможения. В качестве тормозного реле используется электромагнитное реле времени постоянного тока.
Схема может применяться для управления ДПТ с независимым возбуждением и ДПТ с последовательным возбуждением, но в последнем случае — с реверсом тока в последовательной обмотке возбуждения.
Управление динамическим торможением с заданием времени чаще используется при многоступенчатом торможении, когда применяется несколько реле времени, подающих команды на последовательное выведение ступеней тормозного резистора (как при пуске). Узел такой схемы, составленный для ДПТ с независимым возбуждением с тремя ступенями тормозного резистора, приведен на рис. 1, б.
Последовательное включение ступеней торможения осуществляют контакторы КМ2, КМ3, КМ4, управляемые от электромагнитных реле времени КТ1, КТ2 и КТ3. Управляющая команда на начало торможения в схеме подается кнопкой SB1, которая отключает контактор КМ1 и включает КМ2.
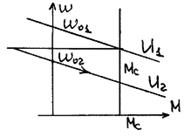
Дальнейшая последовательность включения контакторов КМ3, КМ4 и отключения КМ2 в конце процесса торможения определяется настройкой реле торможения КТ2, КТ3 и КТ1, обеспечивающих переключения при значениях тока I1 и I2, как показано на рис. 1, в. Приведенная схема управления может применяться и для управления двигателем переменного тока в режиме динамического торможения.
При одноступенчатом динамическом торможении наибольшее распространение получило управление моментом с контролем скорости. Узел такой схемы приведен на рис. 2. Контроль скорости осуществляет реле напряжения KV, обмотка которого подключена на якорь ДПТ.
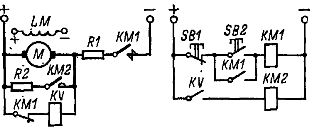
Рис. 2. Схема управления динамическим торможением двигателя постоянного тока с контролем скорости.
Это реле, отключающееся при низкой скорости, подает команду на отключение контактора КМ2 и окончание процесса торможения. Напряжение отпадания реле KV соответствует скорости, составляющей примерно 10—20 % установившегося начального значения:

Практически реле KV настраивается так, чтобы контактор торможения отключался при скорости, близкой к нулю. Так как реле торможения должно отключаться при низких значениях напряжения, то в качестве него выбирается реле напряжения с низким коэффициентом возврата типа РЭВ830.
При торможении двигателей в режиме противовключения, которое чаще всего используется в реверсивных схемах, применение управления с контролем скорости оказывается наиболее простым и надежным.
Узел управления ДПТ СВ в режиме торможения противовключением с одной ступенью тормозного резистора приведен на рис. 3. Тормозной резистор состоит из условно принятой пусковой ступени R2 и ступени противовключения R1. Управляющая команда на реверс с предварительным торможением противовключением в приведенной схеме подается от командоконтроллера SM.
Управление режимом торможения и выдача команды на его окончание производят реле противовключейния KV1 и KV2, в качестве которых используются реле напряжения типа РЭВ821 или РЭВ84. Реле настраиваются на напряжение втягивания из расчета включения его при скорости двигателя, близкой к нулю (15—20 % установившейся скорости):

где Uс — напряжение питающей сети, Rx — часть сопротивления, на которую подключается обмотка реле противовключения (KV1 или KV2), R — полное сопротивление якорной цепи.

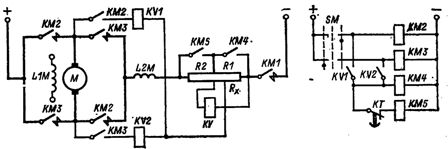
Рис. 4. Узел схемы управлении торможением противовключением двигателя постоянного тока с контролем скорости.
Точка присоединения обмоток реле к пусковому и тормозному резистору, т. е. значение Rx, находится из условия отсутствия напряжения на реле в начале торможения, когда
где ωнач — угловая скорость двигателя в начале торможения.
Отключенное состояние замыкающего контакта реле противовключения в процессе всего периода торможения обеспечивает наличие в якорной цепи ДПТ полного тормозного сопротивления, определяющего допустимый тормозной ток. В конце торможения реле KV1 или KV2, включаясь, подает команду на включение контактора противовключения КМ4 и разрешает начало реверсирования после окончания торможения.
При пуске двигателя реле KV1 или KV2 включается сразу после подачи управляющей команды на пуск двигателя. При этом включается контактор КМ4 и отключает ступень противовключения R1, обмотка реле ускорения КТ шунтируется. По истечении выдержки времени реле КТ замыкается его контакт в цепи катушки контактора КМ5, который, срабатывая, замыкает свой силовой контакт, шунтирующий часть пускового резистора R2, двигатель переходит на естественную характеристику.
При остановке двигателя, особенно в механизмах перемещения и подъема, применяется механическое торможение, осуществляемое колодочным электромагнитным или другим тормозом. Схема включения тормоза приведена на рис. 4. Управление тормозом обеспечивает электромагнит YB, при включении которого тормоз растормаживает двигатель, а при отключении — затормаживает. Для включения электромагнита его обмотка, имеющая обычно большую индуктивность, подключается к напряжению питания контактором с дугогашением, например КМ5.
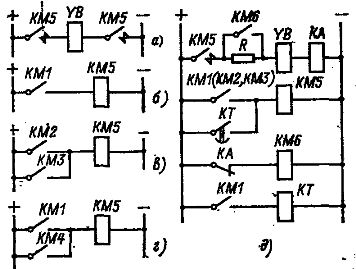
Рис. 4. Узлы схем включения электромагнитного тормоза постоянного тока.
Включается и отключается этот контактор вспомогательными контактами линейного контактора КМ1 (рис. 4, б) или контактором реверса КМ2 и КМЗ (рис. 4, в) в реверсивных схемах. Обычно механическое торможение осуществляется вместе с электрическим, но тормоз может срабатывать, например, после окончания динамического торможения или с выдержкой времени. При этом питание обмотки электромагнита УВ в период динамического торможения осуществляется контактором торможения КМ4 (рис. 4, г).
Часто электромагниты тормозов включаются с форсировкой, осуществляемой дополнительным контактором КМ6 (рис. 4,д). Отключается этот контактор токовым реле КА, которое включается при включении электромагнита тормоза YB. Настраивается реле КА на срабатывание при токе, равном номинальному току холодной обмотки электромагнита тормоза YB при ПВ = 25 %. Реле времени КТ используется для обеспечения наложения механического тормоза при остановке двигателя.
При торможении ДПТ со скорости выше основной, соответствующей ослабленному магнитному потоку, управление моментом при усилении магнитного потока осуществляется с контролем тока. Контроль тока обеспечивает токовое реле КА, осуществляющее релейную обратную связь по току якоря, как это осуществлялось при ослаблении магнитного потока. При динамическом торможении используется узел схемы, приведенный на рис. 5, а, а при торможении противовключением — узел, приведенный на рис. 5, б.
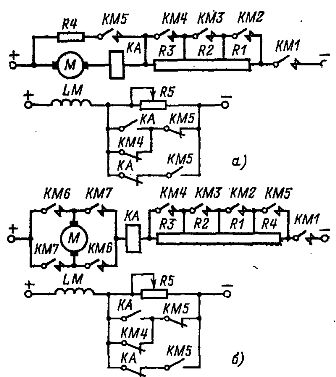
Рис. 5. Узлы схем динамического торможения (а) и противовключения (б) с усилением магнитного потока двигателя постоянного тока с управлением с контролем тока.
В схемах применены три ступени пучкового резистора (R1 — R3) и три контактора ускорения (КМ2 — КМ4), одна ступень динамического торможения и противовключения R4 и один контактор торможения (противовключения) КМ5.
Усиление магнитного потока осуществляется размыкающим контактом токового реле КА, цепь через который создается при включении контактора торможения КМ5, а цепь замыкающего контакта КА, служащего для ослабления магнитного потока при пуске, при этом разрывается размыкающим вспомогательным контактом контактора КМ5.
Реле КА в начале торможения замыкается от броска тормозного тока, а затем при спадании тока размыкается и усиливает магнитный поток, что приводит к возрастанию тока, включению реле КА и ослаблению магнитного потока. За несколько переключений реле магнитный поток усиливается до номинального значения. Далее в схемах будет происходить динамическое торможение и противовключением в соответствии с характеристиками, определяемыми резисторами R4 и R1— R4.
Реле КА настраивается так, чтобы его токи переключения были выше минимального значении тормозного тока, что важно при торможении противовключеиием.
Виды электрического торможения. Электрические двигатели, как правило, используют не только для вращения механизмов, но и для их торможения. Электрическое торможение позволяет быстро остановить механизм или уменьшить его частоту вращения без применения механических тормозов.
Различают три вида электрического торможения двигателей постоянного тока: 1) рекуперативное торможение — генераторное торможение с отдачей электрической энергии в сеть; 2) динамическое или реостатное торможение — генераторное торможение с гашением выработанной энергии в реостате, подключенном к обмотке якоря; 3) электромагнитное торможение — торможение противовключением.
Во всех указанных режимах электромагнитный момент М воздействует на якорь в направлении, противоположном и, т. е. является тормозным.
Рекуперативное торможение. Двигатель с параллельным в озбуждением переходит в режим рекуперативного торможения при увеличении его частоты вращения и выше п0 = U/ceФ. В этом случае ЭДС машины становится больше напряжения сети и ток согласно (8.80) изменяет свое направление, т. е. двигатель переходит в генераторный режим. В этом режиме машина создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть полезно использована.
В машине с параллельным возбуждением (рис. 8.71, а) механические характеристики генераторного режима являются продолжением механических характеристик двигательного режима в область отрицательных моментов.

Рис. 8.71. Схема и механические характеристики машины постоянного тока в двигательном и генераторном режимах.
Динамическое торможение. При этом виде торможения двигателя с параллельным возбуждением обмотку якоря отключают от сети и присоединяют к ней реостат Rдо6 (рис. 8.72, а) При этом машина работает как генератор, создает тормозной момент, но выработанная электрическая энергия бесполезно гасится в реостате. Регулирование тока Ia = Е/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб, подключенного к обмотке якоря.

Рис. 8.72. Схема и механические характеристики двигателя с параллельным возбуждением в режиме динамического торможения.
Электромагнитное торможение. В этом режиме изменяют направление электромагнитного момента М, сохраняя неизменным направление тока из сети, т. е. момент делают тормозным. Последнее осуществляют так же, как и при изменении направления вращения двигателя — путем переключения проводов, подводящих ток к обмотке якоря (рис. 8.76, а) или к обмотке возбуждения. Чтобы ограничить значение тока в этом режиме, в цепь обмотки якоря вводят добавочное сопротивление Rдоб. Регулирование тока Ia = (U + Е)/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб или ЭДС Е (тока возбуждения Iв). Механические характеристики в этом режиме для двигателей с параллельным и последовательным возбуждением показаны на рис. 8.76, б и в.
 Рис.8.76. схема и механические характеристики двигателей в режиме электромагнитного торможения.
Рис.8.76. схема и механические характеристики двигателей в режиме электромагнитного торможения.
21.Универсальные коллекторные двигатели – это электродвигатели малой мощности последовательного возбуждения с секционированной обмоткой возбуждения, благодаря чему они могут работать как на постоянном, так и на переменном стандартных напряжениях примерно с одинаковыми свойствами и характеристиками. Такие электродвигатели используют для привода маломощных быстроходных устройств и многих бытовых приборов. Они допускают простое, широкое и плавное регулирование скорости.
По своему устройству эти двигатели отличаются от двигателей постоянного тока общего применения конструкцией статора, магнитную систему которого собирают из топких изолированных друг от друга листов электротехнической стали с выступающими полюсами, на которых размещают по две секции обмотки возбуждения. Эти секции соединяют последовательно с якорем и располагают по обе стороны от его выводов, что снижает радиопомехи от ценообразования на коллекторе под щетками, которое при питании двигателя от сети переменного напряжения особенно усиливается из-за существенного ухудшения условий коммутации.