Содержание
Так уж получается, что поколения компьютерной техники сменяются очень быстро, и то, что считалось современным 2 года назад, сейчас уже отсталое и снятое с производства. Но что делать потребителю, который не рассчитывает на замену всего комплекса компьютерных устройств каждые 3 года, а хочет всего лишь новый системный блок, оставляя старый принтер, сканер или TV Tuner, и оказывается, что их порты отсутствуют на новом системном блоке или ноуте, потому что считаются устаревшими? А если наоборот: человек на старый системный блок хочет подцепить современную цифровую камеру или несколько USB устройств, а гнёзд не хватает.
Во всех этих случаях помогают самые разнообразные контроллеры. Они бывают как внешние для ноутов, так и в виде плат, вставляемых в PCI порт стандартного ПК. Контроллер – это переходник и разветвитель, если говорить о нём упрощённо. С помощью 1 платы контроллера на старый ПК можно добавить 4-6 USB портов, одни из которых будут находиться на задней планке ПК, а другие будут внутри блока на самой плате контроллера.
Не всегда купленный контроллер будет совместим с Вашим ПК и вполне возможно, что придется его подбирать, меняя на контроллер другого производителя, иначе ПК будет зависать и вытворять другие неприятные вещи.
На большинстве ПК также отсутствует порт 1398, на самом деле тоже являющийся частью USB и используемый многими производителями видеокамер для их подключения к ПК. Такой порт часто используется в контроллерах разветвителях USB совместно с стандартными портами USB.
Также на практически всех современных ПК отсутствует порт LPT, используемый большинством моделей устаревших, но до сих пор работающих, принтеров. Для использования этих портов тоже существуют вставляемые в порт PCI контроллеры, а также внешние контроллеры – переходники с LPT на USB (правда, не всегда срабатывающие).
Так же не забудьте о других переходниках с интерфейсом USB. Это переходники PCI- LPT для настольного ПК или PCMCIA LPT для ноутбука.
Структура и устройство ПЛК
С чего начиналась промышленная автоматика? А начиналось все с контактно-релейных схем управления промышленными процессами. Кроме жуткого «шелестения», контактно релейные схемы имели фиксированную логику работы, и в случае изменения алгоритма, необходимо основательно переделать монтажную схему
Бурное развитие микропроцессорной техники, привели к созданию систем управления технологическими процессами на базе промышленных контроллеров. Но это не означает, что реле изжили себя, у них просто своя ниша для применения.
ПЛК – программируемый логический контроллер, представляют собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления, имеющий конечное количество входов и выходов, подключенных к ним датчиков, ключей, исполнительных механизмов к объекту управления, и предназначенный для работы в режимах реального времени.

Принцип работы ПЛК несколько отличается от «обычных» микропроцессорных устройств. Программное обеспечение универсальных контроллеров состоит из двух частей. Первая часть это системное программное обеспечение. Проводя аналогию с компьютером можно сказать, что это операционная система, т.е. управляет работой узлов контроллера, взаимосвязи составляющих частей, внутренней диагностикой. Системное программное обеспечение ПЛК расположено в постоянной памяти центрального процессора и всегда готово к работе. По включению питания, ПЛК готов взять на себя управление системой уже через несколько миллисекунд. ПЛК работают циклически по методу периодического опроса входных данных.
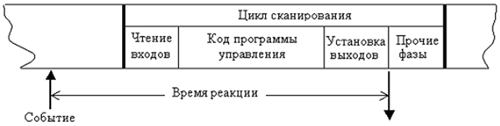
Рабочий цикл ПЛК включает 4 фазы:
1. Опрос входов
2. Выполнение пользовательской программы
3. Установку значений выходов
4. Некоторые вспомогательные операции (диагностика, подготовка данных для отладчика, визуализации и т. д.).
Выполнение 1 фазы обеспечивается системным программным обеспечением. После чего управление передается прикладной программе, той программе, которую вы сами записали в память, по этой программе контроллер делает то что вы пожелаете, а по ее завершению управление опять передается системному уровню. За счет этого обеспечивается максимальная простота построения прикладной программы – ее создатель не должен знать, как производится управление аппаратными ресурсами. Необходимо знать с какого входа приходит сигнал и как на него реагировать на выходах
Очевидно, что время реакции на событие будет зависеть от времени выполнения одного цикла прикладной программы. Определение времени реакции – времени от момента события до момента выдачи соответствующего управляющего сигнала – поясняется на рисунке:
Обладая памятью, ПЛК в зависимости от предыстории событий, способен реагировать по-разному на текущие события. Возможности перепрограммирования, управления по времени, развитые вычислительные способности, включая цифровую обработку сигналов, поднимают ПЛК на более высокий уровень в отличие от простых комбинационных автоматов.
Рассмотрим входа и выхода ПЛК. Существует три вида входов дискретные, аналоговые и специальные
Один дискретный вход ПЛК способен принимать один бинарный электрический сигнал, описываемый двумя состояниями – включен или выключен. Все дискретные входы (общего исполнения) контроллеров обычно рассчитаны на прием стандартных сигналов с уровнем 24 В постоянного тока. Типовое значение тока одного дискретного входа (при входном напряжении 24 В) составляет около 10 мА.
Аналоговый электрический сигнал отражает уровень напряжения или тока, соответствующий некоторой физической величине, в каждый момент времени. Это может быть температура, давление, вес, положение, скорость, частота и т. д.
Поскольку ПЛК является цифровой вычислительной машиной, аналоговые входные сигналы обязательно подвергаются аналого-цифровому преобразованию (АЦП). В результате, образуется дискретная переменная определенной разрядности. Как правило, в ПЛК применяются 8 – 12 разрядные преобразователи, что в большинстве случаев, исходя из современных требований по точности управления технологическими процессами, является достаточным. Кроме этого АЦП более высокой разрядности не оправдывают себя, в первую очередь из-за высокого уровня индустриальных помех, характерных для условий работы контроллеров.
Практически все модули аналогового ввода являются многоканальными. Входной коммутатор подключает вход АЦП к необходимому входу модуля.
Стандартные дискретные и аналоговые входы ПЛК способны удовлетворить большинство потребностей систем промышленной автоматики. Необходимость применения специализированных входов возникает в случаях, когда непосредственная обработка некоторого сигнала программно затруднена, например, требует много времени.
Наиболее часто ПЛК оснащаются специализированными счетными входами для измерения длительности, фиксации фронтов и подсчета импульсов.
Например, при измерении положения и скорости вращения вала очень распространены устройства, формирующие определенное количество импульсов за один оборот – поворотные шифраторы. Частота следования импульсов может достигать нескольких мегагерц. Даже если процессор ПЛК обладает достаточным быстродействием, непосредственный подсчет импульсов в пользовательской программе будет весьма расточительным по времени. Здесь желательно иметь специализированный аппаратный входной блок, способный провести первичную обработку и сформировать, необходимые для прикладной задачи величины.
Вторым распространенным типом специализированных входов являются входы способные очень быстро запускать заданные пользовательские задачи с прерыванием выполнения основной программы – входы прерываний.
Дискретный выход также имеет два состояния – включен и выключен. Они нужны для управления: электромагнитных клапанов, катушек, пускателей, световые сигнализаторы и т.д. В общем сфера их применения огромна, и охватывает почти всю промышленную автоматику.
Конструктивно ПЛК подразделяются на моноблочные, модульные и распределенные. Моноблочные имеют фиксированный набор входов выходов

В модульных контроллерах модули входов – выходов устанавливаются в разном составе и количестве в зависимости от предстоящей задачи

В распределенных системах модули или даже отдельные входа-выхода, образующие единую систему управления, могут быть разнесены на значительные расстояния
Языки программирования ПЛК
При создании системы управления технологического процесса, всегда существует проблема по взаимопониманию программиста и технологов. Технолог скажет «нам надо немного подсыпать, чуть подмешать, еще подсыпать и чуть нагреть». И мало когда следует ждать от технолога формализованного описания алгоритма. И получалось так, что программисту нужно долго вникать в тех. Процесс, потом писать программу. Зачастую при таком подходе программист остается единственным человеком, способным разобраться в своем творении, со всеми вытекающими отсюда последствиями. Такая ситуация породила стремлении создание технологических языков программирования, доступные инженерам и технологам и максимально упрощающим процесс программирования
За последнее десятилетие появилось несколько технологических языков. Более того, Международной Электротехнической Комиссией разработан стандарт МЭК-61131-3, концентрирующий все передовое в области языков программирования для систем автоматизации технологических процессов. Этот стандарт требует от различных изготовителей ПЛК предлагать команды, являющиеся одинаковыми и по внешнему виду, и по действию.
Стандарт специфицирует 5 языков программирования:
- Sequential Function Chart (SFC) – язык последовательных функциональных блоков;
- Function Block Diagram (FBD) – язык функциональных блоковых диаграмм;
- Ladder Diagrams (LАD) – язык релейных диаграмм;
- Statement List (STL) – язык структурированного текста, язык высокого уровня. Напоминает собой Паскаль
- Instruction List (IL) – язык инструкций., это типичный ассемблер с аккумулятором и переходам по метке.
Язык LAD или KOP (с немецкого Kontaktplan) похожи на электрические схемы релейной логики. Поэтому инженерам не знающим мудреных языков программирования, не составит труда написать программу. Язык FBD напоминает создание схем на логических элементах. В каждом из этих языков есть свои минусы и плюсы. Поэтому при выборе специалисты основываются в основном на личном опыте. Хотя большинство программных комплексов дают возможность переконвертировать уже написанную программу из одного языку в другой. Так как некоторые задачи изящно и просто решаются на одном языке, а на другом придется столкнуться с некоторыми трудностями
Наибольшее распространение в настоящее время получили языки LAD, STL и FBD.
Большинство фирм изготовители ПЛК традиционно имеют собственные фирменные наработки в области инструментального программного обеспечения. Например такие как «Concept» Schneider Electric, «Step 7» Siemens.
Программный комплекс CoDeSys
Открытость МЭК стандартов привели к созданию фирм занимающихся исключительно инструментами программирования ПЛК.
Наибольшей популярностью в мире пользуются комплекс CoDeSys. CoDeSys разработан фирмой 3S. Это универсальный инструмент программирования контроллеров на языках МЭК, не привязанной к какой-либо аппаратной платформе и удовлетворяющим всем современным требованиям.
Основные особенности:
– полноценная реализация МЭК языков
– встроенный эмулятор контроллера позволяет проводить отладку проекта без аппаратных средств. Причем эмулируется не некий абстрактный контроллер, а конкретный ПЛК с учетом аппаратной платформы
– встроенные элементы визуализации дают возможность создать модель объекта управления и проводить отладку, т.е. дает возможность создавать человеко-машинного интерфейса (HMI)
– очень широкий набор сервисных функции, ускоряющий работу программиста
– существует русская версия программы, и русская документация
Литература:
Современные технологии промышленной автоматизации: учебник / О. В. Шишов. Саранск : Изд-во Мордов. ун-та, 2007. – 273 с. ISBN 5-7103-1123-5
Вступление
Есть в электротехнике, электронике и вычислительной технике термины, которые объединяют устройства самого различного применения. Один из таких многозначных терминов, термин — контроллер.
Что такое контроллер управления?
Само слово контролер, буквально обозначает управление. Устройство, называемое контроллер, буквально означает — устройство, предназначенное для управления, чем либо.
Самым простым и понятным примером контроллер компьютера, который управляет внешними устройствами клавиатурой и мышью компьютера.
Чтобы был понятен спектр охватываемых приборов и устройств, именуемых контроллеры, приведу более сложный пример — контроллеры ControlLogix. Эта система на базе одного автономного контроллера и модулями ввода/вывода позволяет осуществлять дискретное управление постоянными процессами, управление приводами, сервоприводами в самых различных комбинациях.

Используются программируемые контроллеры для автоматического контролирования работы машин, процессов упаковки, автоматизации зданий и конвейеров, управления освещением зданий и систем безопасности.
Еще один пример, это контролер умного дома. Это базовое устройство для работы данной системы. Без контроллеров управления не обходится ни одна система «умный дом». К входам контроллера «умного дома» подключаются различные датчики (утечки воды, наличие газа, дыма, датчики движения и т.д.). К выходам прибора подключаются сервоприводы и реле управления, которые в автоматическом режиме могут отключить газ, воду, регулировать и управлять светом дома.

Обще устройство контроллеров управления
Рассмотрим обще устройство контроллеров управления. Это поможет, на базовом уровне, понять суть их применения и использования в различных системах.
У любого контроллера есть клеммы входа и выхода. Также у контроллеров управления есть клеммы для подключения внешних интерфейсов. Интерфейсы позволяют контролеру получать и передавать сигналы на различные устройства. Существуют сетевые и коммуникационные интерфейсы.
Например, интерфейс USB позволяет менять прошивку контроллера. Сетевой Ethernet позволяет подключить устройство к сети Интернет и мобильному приложению. Интерфейсы промышленных контроллеров (например, Allen-Bradley) поддерживают промышленные сети (DeviceNet, ProfiBus, Ethernet, ControlNet, DH485 и т.п.).
Базовыми элементами любого контроллера являются входы и выходы устройства. На входы поступают информационные сигналы для дальнейшей обработки. На выходы контроллер сам подает сигнал, который чем-либо управляет.
Например, на вход контроллера поступает сигнал с датчика температуры воздуха. На выход подключаем управление работой кондиционера, включение которого зависит от датчика температуры воздуха.
Или еще пример, на вход подключаем датчик движения, на выход — управление освещением, которое включает/выключает освещение по сигналу датчика.
Входы и выходы

Так как возможностей у контроллеров масса, то и использовать их можно в самых различных комбинациях и системах. Однако важно, входы и выходы контроллера могут быть либо аналоговыми, либо цифровыми (дискретными).
- Дискретный вход воспринимает только наличие (единица) или отсутствие (ноль) сигнала.
- Аналоговый вход «видит» параметры сигнала.
Например, датчики температуры, освещенности, влажности должны подключаться к аналоговому входу. Датчик движения или простой выключатель должны подключаться к дискретному входу.
Вывод
Контроллеры управления это устройства позволяющие получать и обрабатывать сигналы, на базе обработанных сигналов (данных), по вложенным в них алгоритмам, управлять различными машинами, механизмами, приборами.
