Содержание

Особенности конструкции
Двигатели постоянного тока представлены вращающимися нагнетательными элементами, которые размещаются на поверхности статически закрепленной станины. Устройства подобного типа получили широкое применение и эксплуатируются при необходимости обеспечивать разнообразие скоростного регулирования в условиях стабильности вращательных движений привода.
С конструктивной точки зрения все виды ДПТ представлены:
- роторной или якорной частью в виде большого количества катушечных элементов, покрытых специальной токопроводящей обмоткой;
- статичным индуктором в виде стандартной станины, дополненной несколькими магнитными полюсами;
- функциональным щеточным коллектором цилиндрической формы, располагающимся на валу и имеющим медную пластинчатую изоляцию;
- статично зафиксированными контактными щетками, используемыми с целью подведения достаточного количества электротока на роторную часть.
Как правило, электрические двигатели ПТ оснащаются специальными щетками графитового и медно-графитного типа. Вращательные движения вала провоцируют замыкание и размыкание контактной группы, а также способствуют искрению.
Принцип функционирования
Синхронные устройства обращенного функционала характеризуются сменой выполнения задач статором и ротором. Первый элемент служит для возбуждения магнитного поля, а второй в этом случае преобразует достаточное количество энергии.
Якорное вращение в условиях магнитного поля наводится при помощи ЭДС, а движение направлено в соответствии с правилом правой руки. Поворот на 180 о сопровождается стандартной сменой движения ЭДС.

Принцип действия двигателя постоянного тока
Коллекторы посредством щеточного механизма соединяются с двумя витковыми сторонами, что провоцирует удаление пульсирующего напряжения и вызывает образование постоянных токовых величин, а снижение якорной пульсации осуществляется добавочными витками.
Механическая характеристика
На сегодняшний день эксплуатируются электромоторы ПТ нескольких категорий, имеющие различные виды возбуждения:
- независимого типа, при котором обмоточное питание определяется независимым источником энергии;
- последовательного типа, при котором подключение якорной обмотки выполняется в последовательном направлении с обмоточным элементом возбуждения;
- параллельного типа, при котором роторная обмотка подключается в электрической цепи в параллельном для источника питания направлении;
- смешанного типа, основанном на наличии нескольких последовательных и параллельных обмоточных элементов.

Механическая характеристика двигателя постоянного тока независимого возбуждения ДПТ
Благодаря особым механическим характеристикам устройства с постоянными токовыми величинами способны легко переносить негативные внешние воздействия, что объясняется закрытым корпусом с уплотнительными элементами, абсолютно исключающими попадание влаги внутрь конструкции.
Модели независимого возбуждения
Моторы ПТ НВ обладают обмоточным возбуждением, подключаемым к отдельному виду источника для электрического питания. В таком случае обмоточная цепь возбуждения ДПТ НВ дополняется реостатом регулировочного типа, а якорная цепь снабжается добавочными или пусковыми реостатными элементами.
Отличительной особенностью такого вида мотора является независимость токового возбуждения от якорного тока, что обуславливается независимым питанием обмоточного возбуждения.

Характеристики электродвигателей с независимым и параллельным возбуждением
Линейная механическая характеристика при независимом типе возбуждения:
- ω — показатели вращательной частоты;
- U — показатели напряжения на эксплуатируемой якорной цепи;
- Ф — параметры магнитного потока;
- Rя и Rд — уровень якорного и добавочного сопротивления;
- Α — константа конструкции движка.
Данным типом уравнения определяется зависимость вращательной скорости мотора к моменту вала.
Модели последовательного возбуждения
ДПТ с ПТВ представляют собой устройство электрического типа с постоянными токовыми величинами, имеющими обмотку возбуждения, последовательно подключенную к якорной обмотке. Данный тип движков характеризуется справедливостью следующего равенства: током, протекающим в обмотке якоря, равным током обмоточного возбуждения, или I=Iв=Iя.
При использовании последовательного типа возбуждения:
- n0 — показатели частоты вращения вала в условиях холостого хода;
- Δn — показатели изменения частоты вращения в условиях механической нагрузки.
Смещение механических характеристик вдоль оси ординат позволяет им оставаться в полностью параллельном расположении друг другу, благодаря чему регулирование вращательной частоты при изменении данного напряжения U, подведенного к якорной цепи, становится максимально благоприятным.
Модели смешанного возбуждения
Для смешанного возбуждения свойственно расположение между параметрами устройств параллельного и последовательного возбуждения, чем легко обеспечивается значительность пускового момента и полностью исключается любая возможность «разноса» движкового механизма в условиях холостого хода.
В условиях смешанного типа возбуждения:

Двигатель смешанного возбуждения
Регулировка частоты моторного вращения при наличии возбуждения смешанного типа осуществляется по аналогии с двигателями, имеющими параллельное возбуждение, а варьирование МДС-обмоток способствует получению практически любой промежуточной механической характеристики.
Уравнение механической характеристики
Наиболее важные механические характеристики ДПТ представлены естественными и искусственными критериями, при этом первый вариант сравним с номинальным напряжением питания в условиях полного отсутствия добавочного сопротивления на обмоточных цепях мотора. Несоответствие любому из заданных условий позволяет рассматривать характеристику в качестве искусственной.
Это же уравнение может быть представлено в форме ω = ω о.ид. — Δ ω, где:
- ω о.ид. = Uя/kФ
- ω о.ид — показатели угловой скорости холостого идеального хода
- Δ ω = Мэм. [(Rя+Rд)/(kФ)2]— снижение показателей угловой скорости под воздействием нагрузки на вал мотора при пропорциональном сопротивлении цепи якоря
Заключение
Согласно применяемым механическим характеристикам любые ДПТ отличаются конструктивной простотой, доступностью управления и возможностью осуществлять регулировку частоты валового вращения, а также легкостью пуска ДПВ. Кроме прочего, такие устройства могут применяться в качестве генератора и обладают компактными габаритами, что хорошо нивелирует недостатки в виде быстро изнашиваемых графитовых щеток, высокой себестоимости и необходимости обязательно подключать токовые выпрямители.
Видео на тему
Характерной особенностью электродвигателя с независимым возбуждением, является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток возбуждения двигателя Ф не зависит от нагрузки. При этом условии получим, что зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными. Следовательно, линейной будет и механическая характеристика двигателя — зависимость n (М) (рис.).

У двигателя с параллельным возбуждением в цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rп. В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением. Двигатели с параллельным возбуждением применяются для привода станков и различных механизмов, требующих широкой, но жесткой регулировки скорости.
У двигателя последовательного возбуждения якорная обмотка и обмотка возбуждения включены последовательно. Ток возбуждения двигателя одновременно является током якоря. Магнитный поток индуктора пропорционален току якоря.

где k – коэффициент пропорциональности.
Момент на валу двигателя пропорционален квадрату тока якоря.

 .
.
Уравнение механической характеристики двигателя последовательного возбуждения выглядит следующим образом:
 .
.
Механическая характеристика двигателя последовательного возбуждения является мягкой и имеет гиперболический характер (рис. ниже ). При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Работа двигателя последовательного возбуждения без нагрузки недопустима. Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).

Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.). Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением; поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Электродвигатель со смешанным возбуждением. В этом электродвигателе (рис.) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя. Поэтому
где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя; Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис.) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2
Двигатель смешанного возбуждения имеет механическую характеристику, представляющую собой нечто среднее между механическими характеристиками двигателя параллельного и последовательного возбуждения.
(кривая 4 при малой м. д. с. параллельной обмотки). Достоинством двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл = 0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).
 Двигатели постоянного тока с плавным регулированием частоты вращения находят применение в приводах различных машин, станков и установок. Наряду с широким пределом регулирования частоты вращения они дают возможность получать механические характеристики различной (требуемой) жесткости.
Двигатели постоянного тока с плавным регулированием частоты вращения находят применение в приводах различных машин, станков и установок. Наряду с широким пределом регулирования частоты вращения они дают возможность получать механические характеристики различной (требуемой) жесткости.
Из курса электротехники известно, что уравнение механической характеристики [ n =f(M) ] можно записать в виде

где коэффициенты Се и См зависят от конструктивных данных двигателя; U — напряжение сети; Ф — магнитный поток двигателя; R — сопротивление цепи якоря.
Формула показывает, что если U, R и Ф постоянны, механическая характеристика двигателя параллельного возбуждения представляет прямую линию (рис.). Если в цепи якоря нет сопротивлений, то механическая характеристика естественная (прямая 1, рис.а). Точка А соответствует номинальной частоте вращения n н, а n o называют частотой идеального холостого хода. Жесткость характеристики определяется сопротивлением двигателя R’, куда входит сопротивление обмотки якоря, дополнительных полюсов, компенсационной обмотки, щеток. Влияние сопротивления в цепи якоря на характеристику иллюстрируется прямыми 2 и 3 (см. рис.а).
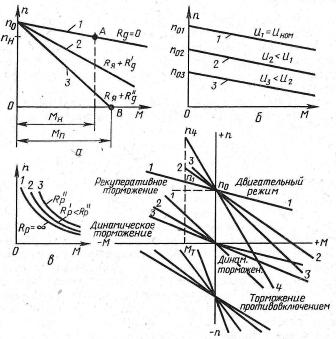
Рис. 1. Механические характеристики двигателей постоянного тока: а – при изменении сопротивления в цепи ротора, б – при изменении напряжения в цепи якоря двигателя постоянного тока с независимым возбуждением, в – при регулировании частоты вращения шунтированием обмотки возбуждения двигателя с последовательным возбуждением, г – при различных режимах торможения.
Формула позволяет оценить влияние напряжения U и потока Ф. При изменении U механическая характеристика двигателя с независимым возбуждением смещается параллельно естественной (рис.б); частота вращения холостого хода при постоянных R и U изменяется обратно пропорционально потоку.
Из формулы при n = 0 имеем

т. е. пусковой момент пропорционален потоку.
Таким образом, частота вращения двигателя может регулироваться изменением магнитного потока, напряжения, подводимого к обмотке якоря, введением сопротивлений в цепь якоря.
Регулирование частоты вращения двигателя изменением Ф применяют довольно часто, так как регулирование происходит плавно, без больших потерь энергии, поддается автоматизации. Диапазон регулирования в сторону увеличения частоты вращения не превышает 1:4, его можно расширить введением небольшой стабилизирующей обмотки последовательного возбуждения наряду с обмоткой дополнительных полюсов.
Регулирование частоты вращения изменением напряжения, подаваемого в цепь якоря двигателя, широко используют у двигателя независимого возбуждения (рис.б). В настоящее время выпускают двигатели с диапазоном регулирования до 1:8, диапазон увеличивается при применении тиристорных преобразователей.