Эта характеристика представляет собой зависимость напряжения U навыводах генератора от тока нагрузки I. При снятии данных для построения внешней характеристики генератор приводят во вращение с номинальной скоростью и нагружают его до номинального тока при номинальном напряжении. Затем, постепенно уменьшая нагрузку вплоть до х.х. (I= 0), снимают показания приборов. Сопротивление цепи возбуждения rB и частоту вращения в течение опыта поддерживают неизменными.На рис. 28.4, а представлена внешняя характеристика генератора независимого возбуждения, из которой видно, что при увеличении тока нагрузки I напряжение на выводах генератора понижается; это объясняется размагничивающим влиянием реакции якоря и падением напряжения в цепи якоря. Наклон внешней характеристики к оси абсцисс (жесткость внешней характеристики) оценивается номинальным изменением напряжения генератора при сбросе нагрузки:
 .
.
Обычно для генератора независимого возбуждения ΔUном = 5 – 10% .
Регулировочная характеристика генератора постоянного тока независимого возбуждения
Характеристика IВ= F(I) показывает, как следует менять ток в цепи возбуждения, чтобы при изменениях нагрузки генератора напряжение на его выводах оставалось неизменным, равным номинальному. При этом частота вращения сохраняется постоянной (n – const).
При работе генератора без нагрузки в цепи возбуждения устанавливают ток Iво, при котором напряжение на выводах генератора становится равным номинальному. Затем постепенно увеличивают нагрузку генератора, одновременно повышают ток возбуждения таким образом, чтобы напряжение генератора во всем диапазоне нагрузок оставалось равным номинальному. Так получают восходящую ветвь характеристики (кривая 1 на рис. 28.4, б). Постепенно уменьшая нагрузку генератора до х.х. и регулируя соответствующим образом ток возбуждения, получают нисходящую ветвь характеристики (кривая 2 на рис. 28.4, б). Нисходящая ветвь регулировочной характеристики расположена ниже восходящей, что объясняется влиянием возросшего остаточного намагничивания магнитной цепи машины в процессе снятия восходящей ветви. Среднюю кривую 3,проведенную между восходящей и нисходящей ветвями, называютпрактической регулировочной характеристикой генератора.
Основной недостаток генераторов независимого возбуждения — это необходимость в постороннем источнике энергии постоянного тока — возбудителе. Однако возможность регулирования напряжения в широких пределах, а также сравнительно жесткая внешняя характеристика этого генератора являются его достоинствами.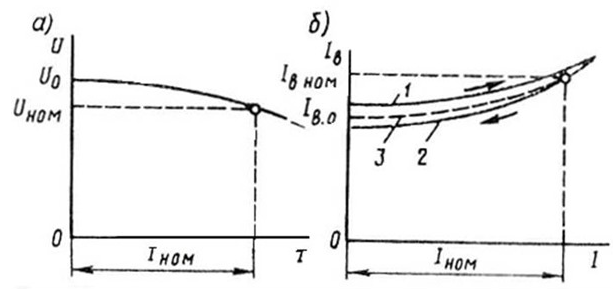
25. Характеристики генератора постоянного тока параллельного возбуждения
Определение. Генераторами параллельного возбуждения называют генераторы, обмотка возбуждения которых питается от ЭДС обмотки якоря и подключена к выводам якоря машины параллельно цепи нагрузки.
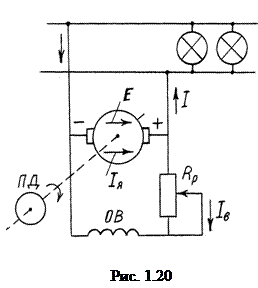
Схема генератора параллельного возбуждения. Схема изображена на рис. 1.20. Ток якоря IЯ = I+ IВ у щеток разветвляется на ток нагрузкиI и ток возбуждения IВ . Обычно ток возбуждения невелик и составляет (0,01-0,05) IЯ.НОМ . Последовательно с обмоткой возбуждения включается реостат RP для регулирования возбуждения. Реостат позволяет изменять ток возбуждения и, следовательно, напряжение генератора.
Характеристика холостого хода генератора с самовозбуждением всегда снимается при независимом возбуждении (обмотка возбуждения отключается от якоря и запитывается от постороннего источника) и поэтому аналогична характеристике холостого хода генератора с независимым возбуждением.
 Характеристика холостого хода U0=f (Iв) при I=0 и n=const. В процессе самовозбуждения в генераторах параллельного возбуждения Ia=Iв, причем Iв=(0,02…0,03) Iн. Поэтому можно пренебречь реакцией якоря и падением напряжения в обмотке якоря и считать, что между характеристиками холостого хода генератора параллельного возбуждения и независимого возбуждения практически нет разницы. Следует учесть, что эта характеристика может быть снята только в одном квадранте, так как процесс самовозбуждения в данном генераторе может протекать только в одном направлении при согласном действии остаточного магнитного потока и потока, создаваемого током возбуждения, причем на прямолинейном участке характеристики напряжение генератора не удается регулировать как у генератора независимого возбуждения, что определяет меньший диапазон регулирования его напряжения.
Характеристика холостого хода U0=f (Iв) при I=0 и n=const. В процессе самовозбуждения в генераторах параллельного возбуждения Ia=Iв, причем Iв=(0,02…0,03) Iн. Поэтому можно пренебречь реакцией якоря и падением напряжения в обмотке якоря и считать, что между характеристиками холостого хода генератора параллельного возбуждения и независимого возбуждения практически нет разницы. Следует учесть, что эта характеристика может быть снята только в одном квадранте, так как процесс самовозбуждения в данном генераторе может протекать только в одном направлении при согласном действии остаточного магнитного потока и потока, создаваемого током возбуждения, причем на прямолинейном участке характеристики напряжение генератора не удается регулировать как у генератора независимого возбуждения, что определяет меньший диапазон регулирования его напряжения.
Нагрузочная характеристика U=f (Iв) при I=const и n=const. Нагрузочные характеристики генератора параллельного возбуждения практически совпадают с характеристиками генератора независимого возбуждения, так как увеличение тока Iа на величину тока возбуждения при параллельном возбуждении не может оказать заметного влияния на напряжение генератора.
Внешняя характеристика U=f (I) при rв=const и n=const (рисунок 1) показывает влияние изменения нагрузки на напряжение генератора. При этом ток возбуждения не регулируется с помощью регулировочного реостата. Следует учесть, что при независимом возбуждении
а при параллельном возбуждении
Последнее равенство означает, что при снятии внешней характеристики ток возбуждения генератора изменяется пропорционально напряжению на генераторе. Таким образом, уменьшение напряжения генератора параллельного возбуждения при увеличении его нагрузки вызывается не только размагничивающим действием реакции якоря и падением напряжения в цепи якоря, но и уменьшением тока возбуждения. Поэтому внешняя характеристика генератора параллельного возбуждения (рисунок 1 ) (кривая 1) располагается ниже внешней характеристики генератора независимого возбуждения (кривая 2).
 В генераторе параллельного возведения ток нагрузки I будет увеличиваться только до определенного критического значения Iкр=(2. 2,5) Iн, после чего он начнет уменьшаться до Iко M1, то скорость электродвигателя начнет уменьшаться. При этом уменьшается и против э. д. с., а ток в обмотке якоря, согласно выражению (22), будет возрастать, что вызовет возрастание вращающего момента. Уменьшение числа оборотов будет происходить до тех пор, пока вращающий момент не станет равным моменту сопротивления Мс2.
В генераторе параллельного возведения ток нагрузки I будет увеличиваться только до определенного критического значения Iкр=(2. 2,5) Iн, после чего он начнет уменьшаться до Iко M1, то скорость электродвигателя начнет уменьшаться. При этом уменьшается и против э. д. с., а ток в обмотке якоря, согласно выражению (22), будет возрастать, что вызовет возрастание вращающего момента. Уменьшение числа оборотов будет происходить до тех пор, пока вращающий момент не станет равным моменту сопротивления Мс2.
При уменьшении момента сопротивления происходит обратный процесс. Если момент сопротивления станет меньше вращающего момента, развиваемого электродвигателем, то скорость вращения последнего начнет возрастать. Это вызовет возрастание противо э. д. с., а значит, уменьшение тока и вращающего момента. Процесс прекратится, когда вращающий момент станет равным моменту сопротивления на валу электродвигателя.
28. Электромеханические (скоростные) и механические характеристики двигателя постоянного тока последовательного возбуждения.
Коллекторные двигатели послдовательного возбуждения чаще применяются в неуправляемых электроприводах. Их достоинством является возможность одновременного обеспечения большого пускового момента и высокой скорости холостого хода, что способствует их применению в качестве тяговых двигателей на транспорте или исполнительных двигателей механизмов с широким диапазоном скоростей. В последнее время такие двигатели находят применение в бытовой технике. Например, в приводе барабана стиральной машины, где эти двигатели используются и как управляемые
Схема замещения двигателя в первом приближении может быть представлена в виде рис. 2.12, где, кроме обозначений, принятых в предыдущем параграфе, обозначено Rвт, Lвт – активное сопротивление и индуктивность короткозамкнутого контура вихревых токов.
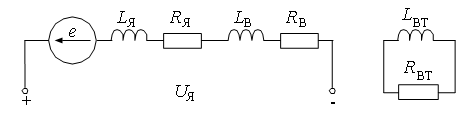
Рис. 2.12. Схема замещения двигателя постоянного тока последовательного возбуждения
Из теории электрических машин известно, что вихревые токи образуются в полюсах и в магнитопроводе двигателя при быстром изменении потока. В двигателях большой мощности влияние короткозамкнутого контура на динамические свойства может оказаться существенным. Однако для рассматриваемого класса приводов с мощностью до нескольких киловатт этим влиянием можно пренебречь. Тогда, в соответствии со схемой замещения и с учетом выражения (2.3), уравнение напряжения якорной цепи получит вид
В отличие от двигателей независимого возбуждения здесь магнитный поток является функцией тока якоря. Как мы отмечали, эта зависимость нелинейная, поэтому нелинейная и механическая характеристика, которую для реальной зависимости потока от тока (см. рис. 2.8.а) вообще трудно выразить аналитически. Для того, чтобы представить электромеханические характеристики в аналитической форме, заменим, как мы делали в предыдущем параграфе, реальную зависимость потока от тока аппроксимированной, вида (см. рис. 2.8.б). Тогда в установившемся режиме при iя≤Iнс, где Iнс – ток двигателя, при котором наступает насыщение магнитной системы, из уравнения (2.57) с учетом (2.6) и (2.43.а) получим уравнения электромеханической:
и механической характеристик:
Здесь k1 – коэффициент, связывающий поток двигателя с током якоря (Φ=k1Iя).
При iя>Iнс из-за насыщения системы согласно (2.43.б) поток условно можно принять постоянным, как и в двигателе независимого возбуждения, поэтому для описания характеристик с определенной степенью приближения справедливы выражения (2.5) и (2.7). Электромеханические характеристики двигателя имеют вид (рис. 2.13).
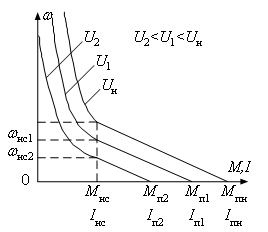
Рис. 2.13. Механические характеристики двигателя последовательного возбуждения
Согласно рис. 2.13 жесткость механической характеристики двигателя последовательного возбуждения – переменная. Для ее оценки при M 2 a *rД), которые интенсивно растут с увеличением мощности двигателя.
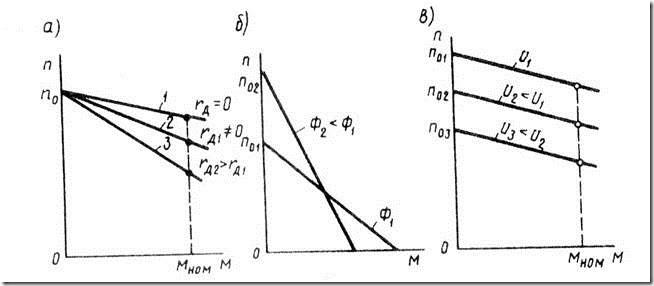
Рис. 29.4. Механические характеристики двигателя параллельного возбуждения:
а — при введении в цепь якоря добавочного сопротивления;
б — при изменении основного магнитного потока;
в — при изменении напряжения в цепи якоря
Регулирование частоты вращения ДПТ НВ изменением основного магнитного потока
Этот способ регулирования в двигателе независимого возбуждения реализуется посредством реостата rрег в цепи обмотки возбуждения. Так, при уменьшении сопротивления реостата возрастает магнитный поток обмотки возбуждения, что сопровождается понижением частоты вращения [см. (29.5)]. При увеличении rрег частота вращения растет. Зависимость частоты вращения от тока возбуждения выражается регулировочной характеристикойдвигателя n=f(IВ) при  и
и .
.
Из выражения (29.5) следует, что с уменьшением магнитного потока Ф частота вращения n увеличивается по гиперболическому закону (рис. 29.5,а). Но одновременно уменьшение Ф ведет к росту тока якоря Ia = M/(Cм*Ф). При потоке  ток якоря достигает значения
ток якоря достигает значения , т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю
, т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю 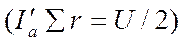 . В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока
. В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока  частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
При небольшом нагрузочном моменте на валу двигателя максимальная частота вращения nmax во много раз превосходит номинальную частоту вращения двигателя nном и является недопустимой по условиям механической прочности двигателя, т. е. может привести к его «разносу». Учитывая это, при выборе реостата rрег необходимо следить за тем, чтобы при полностью введенном его сопротивлении частота вращения двигателя не превысила допустимого значения.
Например, для двигателей серии 2П допускается превышение частоты вращения над номинальной не более чем в 2—3 раза. Необходимо также следить за надежностью электрических соединений в цепи обмотки возбуждения двигателя, так как при разрыве этой цепи магнитный поток уменьшается до значения потока остаточного магнетизма Фост, при котором частота вращения может достигнуть опасного значения.
Вид регулировочных характеристик n = f(Ф) зависит от значения нагрузочного момента M2 на валу двигателя: с ростом M2 максимальная частота вращения nmax уменьшается (рис. 29.5, б).
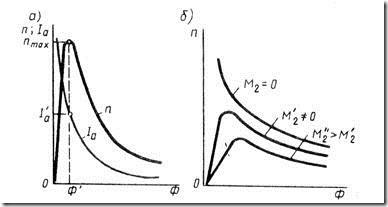
Рис. 29.5. Регулировочные характеристики двигателя независимого возбуждения
Недостаток рассмотренного способа регулирования частоты вращения состоит в том, что при изменении магнитного потока Ф меняется угол наклона механической характеристики двигателя.
Рассмотренный способ регулирования частоты вращения прост и экономичен, так как в двигателях независимого возбуждения ток IВ = (0,01 — 0,07)Iа, а поэтому потери в регулировочном реостате  невелики.
невелики.
Однако диапазон регулирования обычно составляет nMAX/nMIN = 2 — 5. Объясняется это тем, что нижний предел частоты вращения обусловлен насыщением машины, ограничивающим значение магнитного потока Ф, а верхний предел частоты опасностью «разноса» двигателя и усилением влияния реакции якоря, искажающее действие которого при ослаблении основною магнитного потока Ф усиливается и ведет к искрению на коллекторе или же к появлению кругового огня.
Регулирование частоты вращения ДПТ НВ изменение напряжения в цепи якоря
Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при IB = const, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Частота вращения в режиме х.х. n0 пропорциональна напряжению, а  от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4,в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4,в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
Для управления двигателями большой мощности целесообразно применять генератор постоянного тока независимого возбуждения; привод осуществляется посредством приводного двигателя (ПД), в качестве которого обычно используют трехфазный двигатель переменного тока. Для питания постоянным током цепей возбуждения генератора Г и двигателя Диспользуется возбудитель В — генератор постоянного тока, напряжение на выходе которого поддерживается неизменным. Описанная схема управления двигателем постоянного тока (рис. 29.6, б) известна под названием системы «генератор — двигатель» (Г—Д).
Рис. 29.6. Схемы включения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной, так как напряжение свыше номинального недопустимо. При необходимости регулировать частоту вращения вверх от номинальной можно воспользоваться изменением тока возбуждения двигателя.
Изменение направления вращения (реверс) двигателя, работающего по системе Г—Д, осуществляется изменением направления тока в цепи возбуждения генератора Г переключателем П, т. е. переменой полярности напряжения на его зажимах. Если двигатель постоянного тока работает в условиях резко переменной нагрузки, то для смягчения колебаний мощности, потребляемой ПД из трехфазной сети, на вал ПД помещают маховик М,который запасает энергию в период уменьшения нагрузки на двигатель Д и отдает ее в период интенсивной нагрузки двигателя.
Регулирование частоты вращения изменением напряжения в цепи якоря обеспечивает плавное экономичное регулирование в широком диапазонеnMAX/nMIN ≥ 25 . Наибольшая частота вращения здесь ограничивается условиями коммутации, а наименьшая — условиями охлаждения двигателя.
Еще одним достоинством рассматриваемого способа регулирования является то, что он допускает безреостатный пуск двигателя при пониженном напряжении.
 Определение. Генераторами независимого возбуждения называются генераторы постоянного тока, обмотка возбуждения которых питается постоянным током от постороннего источника электрической энергии (сеть постоянного тока, выпрямитель, аккумулятор и др.) или у которых магнитный поток создается постоянными магнитами.
Определение. Генераторами независимого возбуждения называются генераторы постоянного тока, обмотка возбуждения которых питается постоянным током от постороннего источника электрической энергии (сеть постоянного тока, выпрямитель, аккумулятор и др.) или у которых магнитный поток создается постоянными магнитами.
Схема генератора. Схема генератора независимого возбуждения изображена на рис. 1.16. Якорь генератора приводится во вращение от приводного двигателя ПД.
Цепь якоря электрически не соединена с цепью возбуждения, поэтому ток нагрузки I и ток якоря Iя – это один и тот же ток (I = Iя). Цепь возбуждения питается от постороннего источника постоянного тока. В нее включают регулировочный реостат R p , предназначенный для регулирования тока возбуждения Iв, магнитного потока возбуждения и в конечном счете ЭДС и напряжения генератора.
Характеристика холостого хода (рис. 1.17). Характеристика снимается при плавном увеличении тока возбуждения, а затем при его плавном уменьшении при n = nном = const . Вторая ветвь характеристики идет несколько выше первой и при токе Iв = 0 в машине есть некоторая ЭДС E0 , называемая остаточной. Вид характеристики холостого хода объясняется тем, что при n = const E = CenФ пропорциональна магнитному потоку Ф, а последний – индукции В, т.е. ее форма такая же, как у кривой гистерезиса. За расчетную обычно принимают характеристику, проходящую между ветвями экспериментальной кривой (штриховая кривая на рис. 1.17). Остаточная ЭДС E0 создается за счет индукции, остающейся в магнитной цепи статора после отключения тока возбуждения. Машина рассчитывается таким образом, чтобы в номинальном режиме рабочая точка (Iв.ном, Еном) находилась на «колене» характеристики холостого хода, этим обеспечивается получение достаточно высокой ЭДС при относительно небольшом токе возбуждения.
 Внешняя характеристика. Внешняя характеристика генератора U = f(I) при IB = const и n = nном = const (рис. 1.18) характеризует влияние тока нагрузки генератора на напряжение на его выводах. Напряжение U = E – RЯ I при увеличении нагрузки от нуля до номинальной плавно уменьшается на 5 – 15% по двум причинам: из-за падения напряжения на сопротивлении якоря RЯ I и уменьшения ЭДС Е из-за размагничивающего влияния реакции якоря (кривые 1и 1а). При перегрузке машины ток в якоре становится недопустимо большим и напряжение сильно падает (кривая 1а).
Внешняя характеристика. Внешняя характеристика генератора U = f(I) при IB = const и n = nном = const (рис. 1.18) характеризует влияние тока нагрузки генератора на напряжение на его выводах. Напряжение U = E – RЯ I при увеличении нагрузки от нуля до номинальной плавно уменьшается на 5 – 15% по двум причинам: из-за падения напряжения на сопротивлении якоря RЯ I и уменьшения ЭДС Е из-за размагничивающего влияния реакции якоря (кривые 1и 1а). При перегрузке машины ток в якоре становится недопустимо большим и напряжение сильно падает (кривая 1а).
При коротком замыкании ток в якоре Iк примерно в 10 раз больше номинального (он ограничивается только сопротивлением цепи якоря 1к = Е / RЯ) и если быстро не отключить генератор, то его коллектор и обмотка выйдут из строя.
Регулировочная характеристика. Регулировочная характеристика Iв = f(I) при U = const и n = nном = const изображена на рис. 1.19 (кривая 1). Для поддержания постоянства напряжения на выводах якоря в цепь возбуждения включен регулировочный реостат с сопротивлением Rp (рис. 1.16).
Свойства электрических машин постоянного и переменного тока, представляющие интерес с точки зрения практического использования машин, в значительной мере определяются их характеристиками, каждая из которых представляет собой график зависимости между двумя важнейшими величинами.
Основными характеристиками генераторов постоянного тока являются характеристика холостого хода, внешняя и регулировочная характеристики.
Характеристика холостого хода. Характеристика холостого хода E(Iв) генератора независимого возбуждения (рис. 9.12) представляет собой зависимость ЭДС якоря от тока обмотки возбуждения при работе генератора вхолостую (приемник отключен, I = 0) и n= const. Она дает представление о том, как необходимо изменять ток возбуждения, чтобы получать те или иные значения ЭДС генератора.
Изменяя с помощью реостата rр ток Iв , можно изменять магнитный поток Ф и, следовательно, ЭДС Егенератора.
Если магнитная цепь машины была полностью размагничена, то при увеличении тока возбуждения зависимость Ф(Iв) представляется кривой 1(рис. 9.13), подобной кривой намагничивания. Поскольку при n= const ЭДС прямо пропорциональна магнитному потоку, график Ф(Iв) представляет собой в другом масштабе по оси ординат характеристику холостого хода E(Iв).
Каждому значению тока Iв при его уменьшении (кривая 2) соответствуют несколько большие значения потока Ф и ЭДС Е,чем при увеличении тока; при Iв = 0 генератор имеет небольшой поток остаточного намагничивания Ф0 и соответствующую ему ЭДС Е0. Обычно Ф0 = (0,02÷0,06)Фном и E0 = (0,02÷0,06)Eном , где Фном и Eном – магнитный поток и ЭДС, соответствующие номинальным данным генератора.
Рис. 9.13. Характеристики холостого хода генератора независимого возбуждения
Рис. 9.14. Внешние характеристики генератора независимого возбуждения
За расчетную принимают обычно характеристику 3,расположенную между характеристиками 1 и 2. Точку А,соответствующую номинальным данным генератора, выбирают при расчете на «колене» (в зоне наибольшей кривизны) характеристики холостого хода. Выбирать точкуА в области значительного насыщения ферромагнитных материалов нецелесообразно, так как это приводит к значительному увеличению тока, мощности и габаритных размеров обмотки возбуждения при незначительном увеличении ЭДС.
Внешняя характеристика.Внешняя характеристика U(I) генератора постоянного тока независимого возбуждения представляет собой зависимость напряжения на выводах генератора от тока нагрузки при Iв = const и n = const.
Зависимость U(I) может быть получена на основании уравнения, составленного по второму закону Кирхгофа для цепи якоря генератора, согласно которому
где Iя— ток якоря, равный току I приемника; rя — сопротивление якоря, включающее в себя сопротивление обмотки якоря, щеточного контакта, обмотки дополнительных полюсов и компенсационной обмотки (если она имеется).
Так как у генератора независимого возбуждения по условию Iв = const, то пренебрегая реакцией якоря, следует считать Ф = const, а значит, и Е = const. При этих условиях внешняя характеристика U(I) представляет собой прямую линию (характеристика 1 на рис. 9.14).
Если в уравнении (9.11) заменить напряжение согласно закону Ома выражением U = Irп, а затем решить его относительно тока, то получим
| I = | Е | . |
| rя + rп |
Как видно из (9.12) и (9.11), при работе генератора вхолостую (rп = ∞) I = 0 и U = Ux = Е (рис. 9.14). С увеличением числа подключенных приемников эквивалентное сопротивление rпуменьшается, что вызывает увеличение тока нагрузки I, падения напряжения Irя в сопротивленииrя и снижение напряжения U.
Рис. 9.15 Регулировочная характеристика генератора независимого возбуждения
Вследствие реакции якоря магнитный поток и ЭДС несколько уменьшаются при увеличении нагрузки, что приводит к дополнительному снижению напряжения. Внешняя характеристика при этом получается непрямолинейной (характеристика 2 на рис. 9.14). Для получения в этом случае номинального напряжения при токе Iном необходимо устанавливать при холостом ходе несколько большую ЭДС,
Ux1 = E1 > Ux = E.
Относительное изменение напряжения генератора
| ΔIном = | Ux – Uном |
| Uном |
сравнительно невелико и равно примерно 5—10%.
Если при холостом ходе устанавливать различные значения ЭДС, а затем увеличить нагрузку генератора, то можно получить семейство внешних характеристик, подобных характеристике 2, например характеристики 3 и 4 на рис. 9.14.
Регулировочная характеристика.Регулировочная характеристика Iв(I) представляет собой зависимость тока возбуждения от тока нагрузки при n = const и U = const. Она показывает, как необходимо изменять ток возбуждения при изменении тока нагрузки, чтобы поддерживать напряжение.
Возможность поддержания напряжения путем изменения тока Iв вытекает из уравнения (9.11). Как видно, для этого необходимо соответствующим образом изменять ЭДС, что и можно сделать путем изменения тока Iв.
Регулировочная характеристика генератора (рис. 9.15) нелинейна, что объясняется нелинейностью внешней характеристики и характеристики холостого хода.
Недостатком генератора независимого возбуждения является то, что он требует постороннего источника электрической энергии для питания обмотки возбуждения. От указанного недостатка свободны генераторы параллельного и смешанного возбуждения.
Дата добавления: 2018-03-20 ; просмотров: 209 ;
