18 Индукционный регулятор напряжения
Индукционные регуляторы напряжения представляют собой заторможенный асинхронный двигатель с фазным ротором. Им можно регулировать напряжение в широких пределах. Статорная и роторная обмотки в регуляторе соединены электрически, но так, чтобы они могли быть смещены относительно друг друга поворотом ротора.
Индукционный регулятор напряжения
При подключении индукционного регулятора к сети вращающийся магнитный поток наводит в обмотках статора и ротора ЭДС E1 и E2. При совпадении осей в обмотках ЭДС E1 и E2 совпадают по фазе, а на выходных зажимах регулятора устанавливается максимальное значение напряжения.
При повороте ротора оси обмоток поворачиваются на некоторый угол a. На такой же угол смещается и вектор E2. При этом напряжение на выходе уменьшается. Поворотом ротора на угол 180° мы устанавливаем на выходе минимальное напряжение.
Трехфазный индукционный регулятор служит для регулирования напряжения трехфазной сети переменного тока. Обмотка регулятора включается по схеме автотрансформатора, и регулятор представляет собой поворотный автотрансформатор.
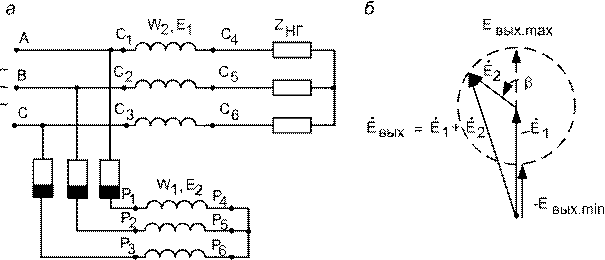
Рис. 12.2. Индукционный регулятор: а – схема соединения обмоток; б – векторная диаграмма напряжений
В качестве первичной обмотки  обычно используют обмотку ротора (рис. 12.2); которую включают в трехфазную сеть.
обычно используют обмотку ротора (рис. 12.2); которую включают в трехфазную сеть.
Вторичной обмоткой  в этом случае является статорная обмотка, которая включается в сеть последовательно с нагрузкой. Вращающееся магнитное поле индуктирует в обмотках статора и ротора эдс
в этом случае является статорная обмотка, которая включается в сеть последовательно с нагрузкой. Вращающееся магнитное поле индуктирует в обмотках статора и ротора эдс  и
и  , которые суммируются геометрически и подаются на зажимы нагрузки. При повороте ротора будет изменяться взаимное положение осей одноименных фаз статора и ротора и, следовательно, будет изменяться фаза эдс ротора
, которые суммируются геометрически и подаются на зажимы нагрузки. При повороте ротора будет изменяться взаимное положение осей одноименных фаз статора и ротора и, следовательно, будет изменяться фаза эдс ротора  ; фаза эдс
; фаза эдс  неизменна, так как
неизменна, так как  . В соответствии с этим выходное напряжение автотрансформатора будет изменяться плавно от
. В соответствии с этим выходное напряжение автотрансформатора будет изменяться плавно от  до
до  (рис. 12.2, б).
(рис. 12.2, б).
Первичная сторона фазорегулятора присоединяется к сети, а вторичная к сопротивлению нагрузки  , как показано на рис. 12.1.
, как показано на рис. 12.1.
Угол b – это электрический угол поворота оси фазы обмотки ротора относительно оси фазы обмотки статора.
Статорная обмотка, включенная в сеть, создает вращающееся магнитное поле, которое индуктирует эдс в обмотках статора и ротора. Эдсстаторной обмотки уравновешивается напряжением сети  , а эдс роторной обмотки подводится к нагрузке.
, а эдс роторной обмотки подводится к нагрузке.
Фаза эдс роторной обмотки зависит от угла поворота ротора: если оси одноименных фаз статора и ротора совпадают, то эдс  совпадет по фазе с эдс
совпадет по фазе с эдс  , так как вращающееся поле пересекает оси одноименных фаз статора и ротора одновременно.
, так как вращающееся поле пересекает оси одноименных фаз статора и ротора одновременно.
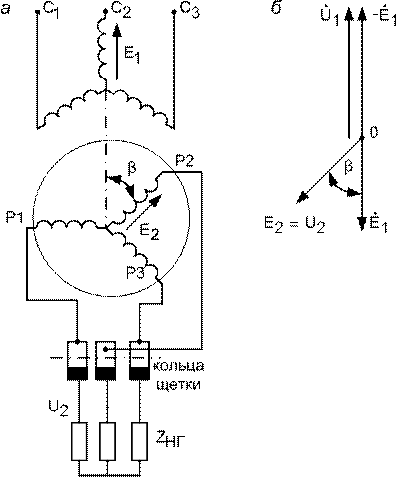
Рис. 12.1. Асинхронная машина в режиме фазорегулятора: а – схема; б – векторная диаграмма напряжений
Если ротор повернуть в направлении вращения магнитного поля на угол b, то максимум потокосцепления и эдс в фазах ротора будет отставать отэдс фаз статора на тот же угол b (рис. 12.1, б). Таким образом, при повороте ротора фаза выходного напряжения ( ) будет плавно меняться, а действующее значение эдс
) будет плавно меняться, а действующее значение эдс  будет неизменным.
будет неизменным.
Фазорегулятор представляет собой поворотный трансформатор с регулируемой фазой вторичного напряжения относительно первичного. Фазорегуляторы находят применение главным образом в лабораториях, например, при испытаниях счетчиков электрической энергии, ваттметров.
Цель работы: изучить конструкцию и принцип действия индукционного регулятора
Индукционный регулятор представляет собой асинхронную машину с заторможенным ротором, регулирующую напряжение в широких пределах.
В роторе регулятора помещается фазная обмотка. Напряжение регулируется поворотом ротора. При этом изменяется сдвиг фаз между ЭДС, которые создаются вращающимся магнитным полем в фазах обмоток статора и ротора.
Для поворота и торможения ротора служит червячная передача с самоторможением (в такой передаче тангенс угла наклона винтовой линии червяка меньше коэффициента, трения).
Схема трехфазного индукционного регулятора показана на рисунке 30.1.
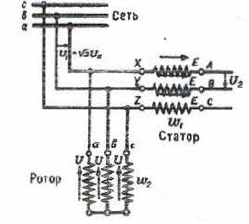 Схема соединения индуктивного регулятора Схема соединения индуктивного регулятора |
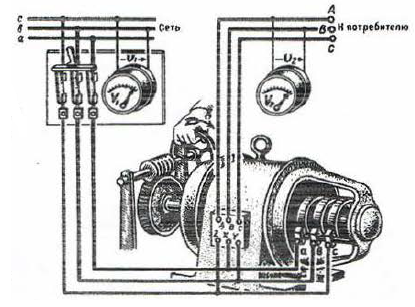 |
Рисунок 30.1 – Схема трехфазного индукционного регулятора
Обмотки статора началами фаз подключены к трем проводам сети источника энергии с напряжением  . К той же сети через скользящие контакты щеток и колец подключена трехфазная обмотка ротора, соединенная звездой. Обмотки статора концами фаз соединены с сетью приемника энергии, напряжение которой
. К той же сети через скользящие контакты щеток и колец подключена трехфазная обмотка ротора, соединенная звездой. Обмотки статора концами фаз соединены с сетью приемника энергии, напряжение которой  может изменяться в широких пределах с помощью индукционного регулятора,
может изменяться в широких пределах с помощью индукционного регулятора,
Возможна схема регулятора, при которой обмотки статора соединены звездой (или треугольником), а обмотки ротора включены между сетями источника и приемника энергии. Недостаток такой схемы – наличие двух комплектов контактных колец. Для устранения скользящих контактов обмотки ротора соединяют гибкими проводниками с сетями приемника и источника энергии, а на роторе ставят ограничитель» не позволяющий повернуть ротор на 360°.
При включении регулятора в сеть U трехфазная обмотка ротора создает вращающееся магнитное ноле, которое индуктирует ЭДС в фазах обмоток статора (  ) и ротора (
) и ротора (  ). Если пренебречь падением напряжения в активном и индуктивном сопротивлениях обмотки ротора, то для фазных значений приложенного напряжения
). Если пренебречь падением напряжения в активном и индуктивном сопротивлениях обмотки ротора, то для фазных значений приложенного напряжения  и ЭДС ротора
и ЭДС ротора  можно записать, что
можно записать, что
 (справедливо для любого положения ротора).
(справедливо для любого положения ротора).
Таким образом, вектор ЭДС  равен и противоположен вектору
равен и противоположен вектору  при любом положении ротора в пространстве.
при любом положении ротора в пространстве.
Если ротор занимает такое положение, при котором оси катушек статора и ротора совпадают, то и ЭДС, индуктируемые вращающимся магнитным полем: в обмотках статора и ротора, также, совпадают по фазе, то есть вектор  совпадает с вектором
совпадает с вектором  и направлен противоположно вектору
и направлен противоположно вектору  .
.
Если повернуть ротор на какой-либо угол  по направлению вращения магнитного поля, то силовые линии вращающегося поля пересекают витки катушек статора раньше, чем витки катушек ротора. Тогда ЭДС статора опережает по фазе ЭДС ротора, то есть вектор ЭДС статора
по направлению вращения магнитного поля, то силовые линии вращающегося поля пересекают витки катушек статора раньше, чем витки катушек ротора. Тогда ЭДС статора опережает по фазе ЭДС ротора, то есть вектор ЭДС статора  неизменный по величине, окажется повернутым на угол
неизменный по величине, окажется повернутым на угол  , относительно неизменного вектора
, относительно неизменного вектора  , равного вектору
, равного вектору  с обратным знаком.
с обратным знаком.
При повороте ротора против поля  ЭДС статора будет отставать по фазе от ЭДС ротора. Изменяя угол поворота ротора, мы будем менять угол между векторами фазных ЭДС статора и ротора, и если непрерывно поворачивать ротор, то вектор ЭДС статора будет изменять свое положение так, что конец этого вектора опишет окружность радиусом
ЭДС статора будет отставать по фазе от ЭДС ротора. Изменяя угол поворота ротора, мы будем менять угол между векторами фазных ЭДС статора и ротора, и если непрерывно поворачивать ротор, то вектор ЭДС статора будет изменять свое положение так, что конец этого вектора опишет окружность радиусом  из точки А, являющейся концом вектора
из точки А, являющейся концом вектора  , как это показано на векторной диаграмме (рисунок 30.3),
, как это показано на векторной диаграмме (рисунок 30.3),
Рисунок 30. 3 – Векторная диаграмма для одной фазы индукционного регулятора
построенной для одной фазы регулятора.
Напряжение  зависит не только от приложенного напряжения
зависит не только от приложенного напряжения  но также и от ЭДС статора так что оно определится как геометрическая сумма
но также и от ЭДС статора так что оно определится как геометрическая сумма  и
и  то есть
то есть  =
=  +
+  .
.
Численное значение напряжения:

При повороте ротора от 0 до 180° может быть получено любое напряжение на выходе в пределах от  , (при
, (при  – 0°) до
– 0°) до  (при
(при  = 180).
= 180).
Если выполнить регулятор с коэффициентом трансформации равным единице, то есть  то
то  и
и  и, следовательно, такой регулятор дает возможность регулировать напряжение на выходе в пределах от нуля до двойного напряжения сети.
и, следовательно, такой регулятор дает возможность регулировать напряжение на выходе в пределах от нуля до двойного напряжения сети.
Возможность равномерного изменения напряжения в широких пределах – очень ценное свойство, благодаря которому этот регулятор широко применяют. Однако регулятор обладает рядом недостатков, которые выражаются в следующем:
1) регулируемое напряжение  изменяется не только по величине, но и по фазе, что не позволяет включать этот регулятор параллельно с каким-либо другим регулятором;
изменяется не только по величине, но и по фазе, что не позволяет включать этот регулятор параллельно с каким-либо другим регулятором;
2) на валу регулятора создаются большие вращающие моменты, вызывающие необходимость в громоздкой механической передаче с самоторможением;
3) обмотки регулятора имеют большие индуктивные сопротивления, которые приводят к значительному изменению напряжения при колебаниях нагрузки;
4) за счет наличия воздушного зазора между статором и ротором в регуляторе, так же как и в любой асинхронной машине, оказывается большим реактивный намагничивающий ток, и регулятор имеет низкий  .
.
Первые два недостатка – изменение фазы напряжения и механические силы на валу регулятора – в устройствах большой мощности устраняются сдвоенными регуляторами, векторы ЭДС статорных обмоток которых поворачиваются в противоположных направлениях при повороте ротора.
Характер изменения вторичного напряжения при повороте ротора показан на рисунок 30.4.
Рисунок 30.4 – Изменения вторичного напряжения при повороте ротора регулятора
Векторная диаграмма напряжений регулятора при заданном угле поворота ротора, приведена на рисунок 30.5.
Рисунок 30.5 – Векторная диаграмма напряжений регулятора при заданном угле поворота ротора 
Индукционный регулятор может быть использован и для регулировки угла сдвига фаз между двумя напряжениями. Достаточно переключить обмотки регулятора, как это показано на рисунке 30.6.
Рисунок 30.6 – Трехфазный поворотный трансформатор регулятор фаз
Векторная диаграмма напряжений регулятора, соответствующая такой схеме включения, приведена на рисунке 30.7.
Рисунок 30.7 – Векторная диаграмма напряжений регулятора фаз при заданном угле поворота ротора 
Следует иметь в виду, что регулятор используют при автотрансформаторной схеме и, следовательно, его регулируемая или выходная мощность  , отдаваемая приемникам энергии, не равна номинальной или габаритной мощности
, отдаваемая приемникам энергии, не равна номинальной или габаритной мощности  .
.
Между этими мощностями так же, как в автотрансформаторе, имеет место следующее соотношение:
 или
или 
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Где применяются индукционные регуляторы?
2. Как могут быть включены обмотки регулятора и к чему это приводит?
3. Для чего необходима в конструкции индукционного регулятора червячная передача с самоторможением?
4. Чем отличается схема включения обмоток регулятора для изменения фазы, от схемы для изменения напряжения?
5. Чем определяется номинальная мощность на выходе индукционного регулятора?
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: На стипендию можно купить что-нибудь, но не больше. 9026 –  | 7255 –
| 7255 –  или читать все.
или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
В этом режиме обмотка ротора, соединенная по схеме «звезда», является первичной обмоткой и включается в сеть, обмотка статора – вторичная обмотка, или проходная – также включается в сеть зажимами С1; С2; СЗ параллельно обмотке ротора. К зажимам С4; С5; С6 обмотки статора подключается нагрузка (рис. 16.1).
Ток, протекающий по первичной обмотке (обмотке ротора), создает вращающееся магнитное поле, которое индуктирует в каждой фазе проходной обмотки (обмотки статора) эдс Е2. При электрическом соединении обмоток статора и ротора вторичное напряжение  представляет геометрическую сумму напряжения сети U1, и эдс проходной обмотки Е2. При повороте ротора на любой угол
представляет геометрическую сумму напряжения сети U1, и эдс проходной обмотки Е2. При повороте ротора на любой угол  т. е. изменении взаимного расположения осей обмоток ротора и статора, создается сдвиг по фазе между U1 и E2 на угол
т. е. изменении взаимного расположения осей обмоток ротора и статора, создается сдвиг по фазе между U1 и E2 на угол  . При = 0 напряжение U2 будет максимальным и равняется арифметической сумме U1 + Е2. При = 180° векторы направлены противоположно, и напряжение U2 будет минимальным и равным арифметической разности U1 – Е2.
. При = 0 напряжение U2 будет максимальным и равняется арифметической сумме U1 + Е2. При = 180° векторы направлены противоположно, и напряжение U2 будет минимальным и равным арифметической разности U1 – Е2.
При промежуточных значениях  напряжение U2 равно геометрической сумме U1 и E2 и будет изменяться между значениями U2max и U2min.
напряжение U2 равно геометрической сумме U1 и E2 и будет изменяться между значениями U2max и U2min.
Векторная диаграмма напряжений для фазы представлена на рис. 16.2.
Связь между геометрическим углом поворота ротора и электрическим углом поворота вектора  выражается уравнением = Р × где Р – число пар полюсов машины.
выражается уравнением = Р × где Р – число пар полюсов машины.
Рис. 16.2. Векторная диаграмма индукционного регулятора
В лабораторной работе надо исследовать зависимость вторичного напряжения U2 от электрического угла . Угол можно определять из соотношения

где U1ф – приложенное фазное напряжение; Е2 – эдс в обмотке статора, индуктированная магнитным полем ротора;  – вторичное фазное напряжение.
– вторичное фазное напряжение.
Для определения зависимости U2 от угла a следует поворачивать ротор в режиме холостого хода (  ) иданные заносить в табл. 16.1.
) иданные заносить в табл. 16.1.
Данные испытания индукционного регулятора
| Измерено | Вычислено | ||||||
 , град. , град. |
 , В , В |
 , В , В |
 , В , В |
 , А , А |
, В |
 |
a, град. |
По опытным данным построить зависимость U2 от угла и векторные диаграммы для = 30° и = 60°.
Затем снять внешнюю характеристику индукционного регулятора. Поворачивая ротор при холостом ходе, установить напряжение U2 равным 380 В. Постепенно, увеличивая нагрузку (включая лампы реостата), снять зависимость U2 от I2 (табл. 16.2).
Данные испытаний индукционного регулятора под нагрузкой
| , В |
| , А |
Режим регулируемой реактивной катушки. Асинхронная машина с заторможенным ротором может работать в режиме регулируемой реактивной катушки при последовательном или параллельном соединении обмоток статора и ротора.
 Чаще используется схема последовательного соединения обмоток (рис. 16.3).
Чаще используется схема последовательного соединения обмоток (рис. 16.3).
Приступая к выполнению лабораторной работы, следует снять зависимость I = f ( ). Снятие этой характеристики ведется в следующем порядке. Реактивную катушку подключают к источнику трехфазного тока, предварительно установив ротор в положение, соответствующее минимальному току I = min ( = 0). Затем, изменяя угол поворота ротора от = 0 до = 180 в обе стороны, записывают значения угла и тока I в табл. 16.3.
Данные испытаний реактивной катушки
| , град. |
| , А |
Построить графическую зависимость  .
.
Режим фазорегулятора. Для осуществления режима фазорегулятора ротор машины затормаживают и снабжают приспособлением для поворота вала на требуемые углы. Статор включают в сеть и используют в качестве первичной обмотки, а от обмотки ротора, как от вторичной обмотки, питают нагрузку.
Необходимый сдвиг по фазе между первичным и вторичным напряжением достигают поворотом вала ротора на определенный угол.
Фазорегулятор используется в измерительных лабораториях поверки счетчиков, научно-исследовательских лабораториях и системах регулирования, например, схеме регулирования напряжения ртутных выпрямителей путем изменения фазы сеточного напряжения.
Принципиальная схема фазорегулятора приведена на рис. 16.4, а. На рис. 16.4, б соответственно показана векторная диаграмма напряжений фазорегулятора.
| Рис. 16.4. Схема и векторная диаграмма напряжений фазорегулятора: а – схема фазорегулятора; б – векторная диаграмма напряжений фазорегулятора |
Режим индукционного регулятора. Обмотки индукционного регулятора включаются по схеме автотрансформатора, и регулятор представляет, в сущности, поворотный автотрансформатор. Принципиальная схема соединения обмоток трехфазного индукционного регулятора представлена на рис. 16.4. Первичной обмоткой является обычно обмотка ротора, так как она имеет 3 вывода (контактные кольца и щетки).
Рабочая схема испытания фазорегулятора приведена на рис. 16.5.

Рис.16.5. Схема фазорегулятора
Произвести испытания фазорегулятора. Для этого, изменяя положение ротора относительно статора от 0до180° через каждые 15°, записать показания приборов в табл. 16.4.
Данные исследования фазорегулятора
| № п/п | Измерено | Вычислено | ||||||
| , град. |
U1, В | U2, В | I, А | P, Вт |  |
, град |
 |
 |
| и т.д. |
Вычислить коэффициент мощности электрического угла поворота ротора по формуле
 .
.
Эта формула поясняется следующим. Показание ваттметра Р равно произведению тока и напряжения, подведенных к ваттметру, и косинуса угла сдвига фаз между их векторами. Ток, проходящий по токовой обмотке ваттметра, равен  и находится в фазе с напряжением U1, так как
и находится в фазе с напряжением U1, так как  – активное сопротивление. К обмотке напряжения ваттметра подводится непосредственно напряжение U2. Поэтому
– активное сопротивление. К обмотке напряжения ваттметра подводится непосредственно напряжение U2. Поэтому  . Если
. Если  , то
, то  . Положение ротора, при котором получается это значение Р, соответствует совпадению осей обмоток статора и ротора.
. Положение ротора, при котором получается это значение Р, соответствует совпадению осей обмоток статора и ротора.
По данным табл. 16.4 построить векторные диаграммы для случаев:
а) = 0°; в) = 45°; с) = 135°.
Условия, для которых следует строить векторные диаграммы, могут быть изменены преподавателем.
По результатам выполненной работы сформулировать выводы.
Рекомендуемая литература: [1, 2, 3].
Лабораторная работа № 17
ИССЛЕДОВАНИЕ ЛИНЕЙНОГО и дугостаторного
АСИНХРОНных ДВИГАТЕЛей
Цель работы: изучение конструктивных особенностей и принципа работы линейного и дугостаторного асинхронных двигателей и снятие его рабочих характеристик.
Оборудование и приборы:
• источник трехфазного синусоидального тока напряжения 220 В;
• комплект измерительных приборов К505 с пофазным измерением тока, напряжения и мощности;
• линейный асинхронный двигатель двухстороннего исполнения (ЛАД);
• электромагнитный тормоз для загрузки двигателя;
• лабораторный автотрансформатор с выпрямителем для питания обмотки тормоза (ЛАТР);
• тахометр для измерения частоты вращения двигателя.
Порядок выполнения работы


Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого.