Содержание
- 1 Похожие статьи
- 1.1 Преобразования переменных в системах координат a, b, c и α, β
- 1.2 Исследование системы векторного управления.
- 1.3 Пространственные векторы в асинхронном двигателе
- 1.4 Обзор алгоритмов управления асинхронными электроприводами
- 1.5 Моделирование системы АИН ШИМ – АД с переменными ψr – Is.
- 1.6 Моделирование САР скорости системы «АИН ШИМ – АД».
- 1.7 Моделирование системы АИН ШИМ – АД с переменными во.
- 1.8 Быстрый метод пространственно-векторной широтно-импульсной.
- 1.9 Применение вейвлет-преобразования для идентификации.
Рассмотрим подробнее работу Однофазного мостового активного выпрямителя напряжения (рисунок 32). Нетрудно видеть, что эта схема полностью совпадает со схемой однофазного инвертора напряжения и представляет собой инверсное относительно зажимов питания и нагрузки включение схемы автономного инвертора напряжения. Перечислим характерные признаки, присущие схеме активного преобразователя напряжения, обеспечивающие неизменную полярность на зажимах цепи постоянного тока:
– наличие полностью управляемых полупроводниковых приборов, шунтированных встречно – параллельно включенными обратными диодами, образующие совместно с транзисторами управляемые ключи (УК1,УК2, УК3 и УК4), обладающие двухсторонней проводимостью тока при наличии включающих сигналов управления. При отсутствии сигналов управления ключи обладают односторонней (обратной) проводимостью;
– буферного реактора (БР) во входной цепи переменного тока;
– включение фильтрующего конденсатора параллельно нагрузке на выходных зажимах преобразователя.
Эти особенности в сочетании с импульсно-модуляционными алгоритмами работы преобразователя обеспечивают возможность его работы как в выпрямительном, так и в инверторном режимах работы при неизменной полярности выходного напряжения с реализацией возможности двухсторонней передачи электрической энергии от питающей сети в нагрузку и обратно

Рисунок 32. Однофазная мостовая схема активного выпрямителя тока
Обозначения элементов схем, приведенных на рисунках 32 и 33:
ua– источник напряжения переменного тока;
Eнг– источник напряжения постоянного тока;
VT1, VT2, VT3 и VT4- полностью управляемые полупроводниковые ключи;
БР- буферный реактор;
Zнг, Rнг, Lнг– полное, активное и индуктивное сопротивления цепи нагрузки;

Рисунок 33. Однофазная мостовая схема активного выпрямителя
На рисунке 33 стрелками показано направление токов цепей преобразователя, соответствующие выпрямительному режиму работы силовой схемы. Вентильный блок содержит четыре полностью управляемых полупроводниковых ключа (УК1,УК2, УК3 и УК4). Напомним, что полностью управляемый полупроводниковый ключ- это транзистор и встречно – параллельно включенный диод. Так, УК1 –это VT1 и VD1 (смотри схему рисунок 33). Входное напряжение выпрямителя (напряжение на зажимах а-в (Uав), представляющее собой инвертированное напряжение цепи постоянного тока, может регулироваться по величине и по фазе за счет изменения глубины модуляции и фазы модулирующего сигнала относительно сетевого напряжения. Частота напряжения на силовом входе вентильного блока Uав строго поддерживается равной частоте сети переменного тока, к которой подключен активный выпрямитель. Источник входного (сетевого) напряжения переменного тока (Ua) подключается к входам вентильного блока (зажимы а-в) через буферный реактор, Положительный импульс напряжения Uав получается при одновременном открытых ключах УК1 и УК2, отрицательный импульс- при открытых ключах УК3 и УК4. При одновременной проводимости ключей УК1 и УК3 или УК2 и УК4 входное напряжение преобразователя (Uав) равно нулю. На выходе выпрямителя включен конденсатор С, фильтрующий напряжения цепи постоянного тока. Нагрузка представлена последовательно включенными комплексным сопротивлением Zнг и источником противо-ЭДС Енг. Дискретные сигналы управления ключей силовой схемы формируются схемой управления.
Прицип работы схемы управления можно пояснить с помощью рисунка 34, на котором изображены пилообразное (опорное) напряжение uоп, напряжение управления uy1 (модулирующего напряжения) транзисторами одного плеча (или одной фазы трехфазной схемы) моста, а также функции состояния двух транзисторов этого плеча моста ki1 и 1-ki1. (например, ключей VT1-VD1 и VT4-VD4, соответственно), или фазы а трехфазного моста.

Рисунок 34.Опорное напряжение, напряжение управления и функции состояния транзисторов одного плеча моста АИН в режиме синусоидальной ШИМ
Если напряжения управления синусоидальны и их амплитуда не превышает амплитуду опорного напряжения, то считается, что преобразователь работает в режиме синусоидальной ШИМ. Такой принцип управления реализуется и трехфазных мостовых схемах.
В реальных установках, вследствие дискретности микропроцессорных устройств управления, напряжения управления имеют ступенчатую форму с «гладкими» составляющими, близкими по форме к синусоиде. Длительность цикла работы микропроцессорных систем управления Δty во многих случаях принимается равной периоду Tоп пилообразного напряжения. В пределах этого периода напряжения управления всех фаз неизменны. Временные диаграммы, приведенные на рисунке 34, построены с учетом этой особенности систем.
В моменты равенства опорного напряжения и напряжений управления осуществляются переключения транзисторов. Существует минимально допустимое время переключения транзисторов, которое несколько сужает активную зону опорного напряжения (участвующую в формировании импульсов управления) на величину Duоп сверху и снизу. Если амплитуду опорного напряжения принять равной 1, то в соответствии с рисунком 34 активная зона напряжений управления находится в пределах от(–1+Δuоп) до (1–Δuоп).
Если напряжение управления какой-либо фазы находится в активной зоне пилообразного напряжения, то в течение периода Tоп в данной фазе происходит одно включение и одно выключение транзистора с соответствующими переключениями токов, одно включение и одно выключение обратного диода, а также одно включение и одно выключение транзистора без тока. Если напряжение управления выходит за пределы активной зоны пилообразного напряжения, то в данной фазе на данном периоде вентили не переключаются, если ток фазы нагрузки не изменяет знак.
При работе в режиме ШИМ «гладкие» составляющие выходных напряжений инвертора в первом приближении подобны напряжениям управления фаз (при условии постоянства напряжения конденсатора в цепи постоянного тока).
На рисунке 35 изображены опорное напряжение uоп и напряжение управления uy1 одной фазы при выходе напряжения управления на некоторых отрезках времени за пределы активной зоны опорного напряжения (ограниченной пунктирными линиями). В рассматриваемом случае АИН работает в режиме перемодуляции.

Рисунок 35. Опорное напряжение и напряжения управления АИН в режиме перемодуляции
На тех отрезках времени (рисунок 35), на которых напряжения управления выходят за пределы рабочей зоны опорного напряжения, переключения вентилей управляющими импульсами не производятся. На этих участках фактические напряжения управления могут быть представлены прямыми линиями, проходящими по границам рабочей зоны на уровне –1+Δuоп или 1–Δuоп. При этом, как изображено на рисунке 35, фактическое напряжение управления uоy1 приближается по форме к трапеции.
При работе в режиме перемодуляции «гладкие» составляющие выходных напряжений инвертора в первом приближении подобны указанным трапецеидальным (усеченным) напряжениям управления фаз.
При дальнейшем увеличении амплитуды напряжения управления uy1 трапецеидальное напряжение uоy1 приближается к прямоугольной форме. АИН переходит в режим работы при фазной коммутации.
При уменьшении амплитуды модулирующего сигнала величина входного тока уменьшается, а изменение начальной фазы модулирующего сигнала по отношению к напряжению сети переменного тока можно обеспечить коэффициент сдвига по основной гармоники равным единице, либо другого требуемого значения, как индуктивного, так и емкостного.
Высшие гармоники кривой входного тока фильтруются с помощью индуктивности буферных реакторов. При этом эффективность работы фильтра зависит от величины несущей частоты, с которой переключаются транзисторы. В 70-х годах прошлого века известный ученый Маевский О.А. доказал эффективность преобразования электрической энергии с использованием высокой несущей частоты по сравнению с преобразованием энергии на сетевой частоте. Он утверждал, что «при частотном преобразовании реактивной мощности нелинейными активными сопротивлениями коэффициентом пропорциональности при превращении реактивной мощности одной частоты в реактивную мощность другой является отношение их частот» [10]. Другими словами реактивная мощность высокой частоты, преобразуемая в реактивную мощность более низкой частоты, увеличивается в число раз, равное отношению несущей частоты к сетевой частоте и подавление высших гармоник, содержащихся в кривой потребляемого активным выпрямителем тока осуществляется при меньшем значении индуктивности буферных реакторов.
В настоящее время активные выпрямители большой мощности работают при значении несущей частоты от 2,5 до 5 кГц. Дальнейшее повышение несущей частоты ограничивается существенным увеличением потерь мощности в транзисторах и их перегревом, что недопустимо.
Дата добавления: 2015-10-18 ; просмотров: 2340 . Нарушение авторских прав
| Применение активных выпрямителей |
| 23.04.2013 13:01 |
Активный выпрямитель (AFE)Выпрямитель – это преобразователь переменного напряжения в постоянное. Неуправляемые выпрямители выполняются на базе диодов, управляемые – на базе тиристоров или других управляемых вентильных приборов. Принцип выпрямления основан на использовании свойств силовых электронных вентилей проводить однонаправленный ток для преобразования переменного тока в постоянный без существенных потерь энергии. Выпрямители потребляют из сети несинусоидальный ток. Процесс управления выпрямителем приводит к повышению коэффициентов несинусоидальности как тока, так и напряжения. Проблемы возникают следующие:
Для устранения отмеченных выше недостатков можно рекомендовать активный выпрямитель (рис.1).
Такие выпрямители комплектуются полностью управляемыми вентилями с обратными диодами. С помощью широтно-импульсной модуляции реализуются режимы принудительного формирования сетевого тока. Форму тока приближают к синусоидальной с регулируемой начальной фазой, что и обеспечивает желаемый результат (форму кривой тока и коэффициент мощности). При помощи коррекции коэффициента мощности возможно не только организовать потребляемый ток сети, совпадающий по форме и фазе с напряжением, но и обеспечить заданный уровень постоянного напряжения на конденсаторе. Кроме того, в электроприводе за счет связи инвертора-выпрямителя с питающей сетью, возможна обратная рекуперация энергии, получаемая при работе привода в генераторном режиме. Наиболее массовое практическое применение в системах регулируемых электроприводов переменного тока получили двухзвенные преобразователи частоты с промежуточным звеном постоянного тока, а из них – преобразователи с автономными инверторами напряжения. У этого преобразователя недостаточно полно проработаны некоторые вопросы энергосбережения, качества электропотребления и электромагнитной совместимости преобразователей. При использовании пассивного выпрямителя, состоящего из диодного моста и фильтрующего конденсатора, несмотря на малые пульсации выпрямленного выходного напряжения на входе получаем несинусоидальный ток с большими пиковыми значениями. Это значительно понижает коэффициент мощности системы, вызывает существенные радиопомехи. Улучшить форму тока можно путем внесения в цепь дополнительных пассивных элементов. Но это приводит к увеличению массогабаритных показателей устройства, так как реактивные компоненты в таком случае работают на относительно низких частотах. Кроме этого выпрямитель подразумевает поток энергии только в одном направлении от сети в нагрузку. Проблему перенапряжения в звене постоянного тока, возникающую при торможении привода (особенно при большой мощности) в этом типе преобразователя приходится решать с помощью тормозного резистора очень большой мощности, просто рассеивая выделяющуюся энергию в тепло (рис.2).
На рис.3 представлены способы управления энергией при работе частотного электропривода.
Улучшить показатели преобразователей частоты помогает использования в звене постоянного тока выпрямителей с принудительной коммутацией. Структуру силовых цепей двухзвенного ПЧ с активным выпрямителем напряжения иллюстрирует рис.4. В силовой цепи последовательно включены активный выпрямитель напряжения (АВН), фильтр Ф и автономный инвертор напряжения АИН. Силовые полупроводниковые переключающие элементы выпрямителя и инвертора, обладающие полной управляемостью и двусторонней проводимостью тока, условно показаны в виде ключей. Выпрямитель АВН, выполненный по трехфазной мостовой схеме, преобразует напряжение питающей сети переменного тока в стабилизированное напряжение постоянного тока Ud на конденсаторе фильтра. Трехфазный мостовой АИН работает в режиме широтно-импульсной модуляции (ШИМ) и преобразует это постоянное напряжение в переменное напряжение на выходе с требуемыми значениями частоты и амплитуды основной гармоники. Это обеспечивает благоприятную форму тока двигателя и равномерность его вращения в широком диапазоне скоростей.
выпрямителем и автономным инвертором напряжения Активный выпрямитель выполняется по схеме, полностью идентичной схеме инвертора и по существу представляет собой обращенный АИН, также работающий в режиме ШИМ. Так же, как и автономный инвертор, активный выпрямитель инвертирует постоянное напряжение фильтрового конденсатора Ud в импульсное напряжение на своих зажимах переменного тока А, В и С. Эти зажимы связаны с питающей сетью через буферные реакторы БР. В отличие от регулируемой рабочей (полезной) частоты напряжения на зажимах переменного тока АИН А1, В1 и С1 рабочая частота напряжения на зажимах переменного тока АВН постоянна и равна частоте питающей сети. Разность мгновенных значений синусоидального напряжения питающей сети и импульсного напряжения на зажимах переменного тока АВН воспринимаются буферными реакторами БР, являющимися неотъемлемыми элементами системы, индуктивность обеспечивает повышающий режим работы преобразователя. Благодаря использованию режима ШИМ импульсное напряжение, формируемое активным выпрямителем на стороне переменного тока, имеет благоприятный гармонический состав, в котором основная (полезная) гармоника и высшие гармоники существенно различаются по частоте. Это создает благоприятные условия для фильтрации высших гармоник тока, потребляемого из питающей сети, буферными реакторами. Таким образом решается задача потребления из сети практически синусоидального тока.
Компания Delta Electronics предлагает на отечественном рынке модуль рекуперации AFE 2000 не случайно. На настоящий момент для многих предприятий становится существенным рост тарифов за электроэнергию, что влечет повышение стоимости конечного товара, необходимость улучшения качества промышленной сети. Также было принято законодательное решение о мерах по экономии электроэнергии, энергосбережению. Компания «Элпрон» предлагает установку активных рекуператоров «под ключ», то есть от проведения исследований и экономического обоснования до монтажа на объекте.
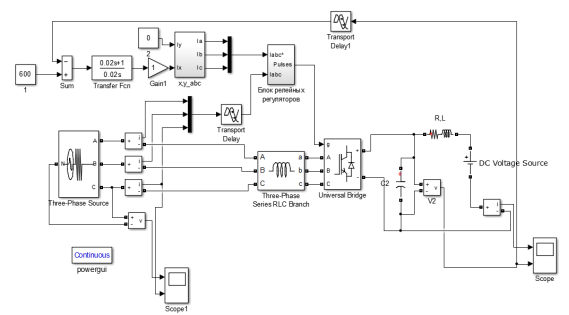
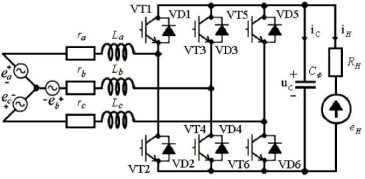
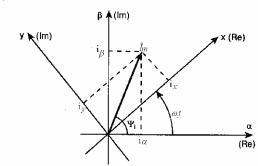
Рубрика: Технические науки Дата публикации: 03.05.2016 2016-05-03 Статья просмотрена: 1551 раз Библиографическое описание:Козлов М. Д. Векторное управление активным выпрямителем напряжения // Молодой ученый. 2016. №9. С. 184-189. URL https://moluch.ru/archive/113/29440/ (дата обращения: 24.11.2019). Замкнутые системы регулируемых электроприводов, как правило, используют двухзвенные преобразователи с промежуточным звеном постоянного тока, включающие в себя неуправляемый выпрямитель, силовой фильтр (СФ) и инвертор с широтно-импульсной модуляцией. Замена диодного выпрямителя на активный преобразователь, выполненного на полностью управляемых ключах, работающий в импульсно-модуляционных алгоритмах управления, позволяет обеспечить двусторонний обмен энергией между первичны источником и двигателем, и таким образом, улучшить электромагнитную совместимость и экономичность использования электроэнергии путем повышения КПД всей системы в целом за счет рекуперации энергии движущихся частей машины. Такие активные преобразователи могут быть построены на основе автономного инвертора напряжения (АИН), если его обратить на сторону переменного тока [1 с.305; 2 с. 400]. Активный преобразователь напряжения может работать в режиме выпрямителя, если передача энергии идет из питающей сети в двигатель и сетевым инвертором пре рекуперации энергии в питающую сеть. В дальнейшем АПН, работающий в выпрямительном режиме, называется активным выпрямителем напряжения (АВН). Работа АВН основана на импульсном повышающем напряжение регуляторе, поэтому он обязательно содержит в своем составе токоограничивающий дроссель, устанавливаемый на стороне переменного тока. На выходе АПН устанавливается конденсатор, обеспечивающий стабилизацию выпрямленного напряжения. [4 с. 256]. В этих преобразователях улучшен гармонический состав тока, потребляемого из сети, а также имеется возможность получения желаемого значения коэффициента мощности, в том числе близкого к единице. Рис. 1. Трехфазный АВН АВН могут применяться в трех случаях [5 с.128]: 1) для получения стабильного постоянного напряжения от сети переменного с возможностью рекуперации энергии; 2) в качестве преобразователя для питания двигателей постоянного тока с возможностью регулирования скорости и рекуперативного торможения; 3) в качестве первого звена в двухзвенных преобразователях для питания асинхронных двигателей с возможностью регулирования скорости и рекуперативного торможения. Существует несколько подходов к векторному управлению активными выпрямителями напряжения с преобразованием координат [1 с.205; 3 с.356]. В этой статье рассмотрен подход, основанный на раздельном управлении АВН по проекциям Ix и Iy обобщенного вектора сетевого тока. Описание электромагнитных процессов проводится в ортогональной системе координат x,y, связанной с результирующим вектором питающей сети. Математическая основа преобразования координат от неподвижной (αβ) к синхронно вращающейся системе показана ниже. Рис. 2. Преобразование координат в векторной системе управления Во вращающейся системе координат вектор тока представлен в виде:
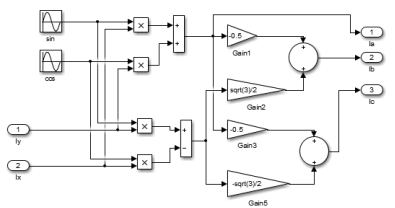
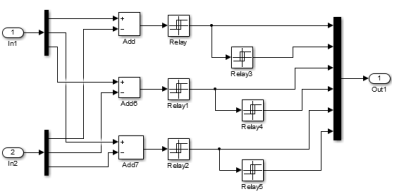
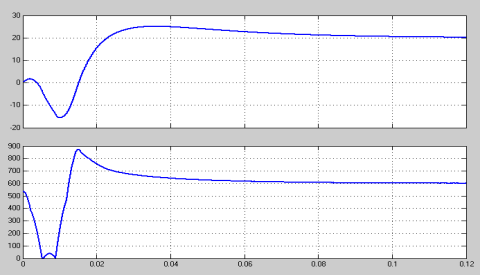
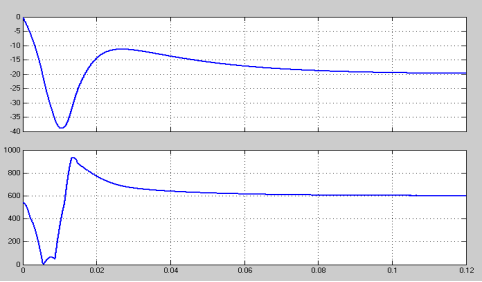
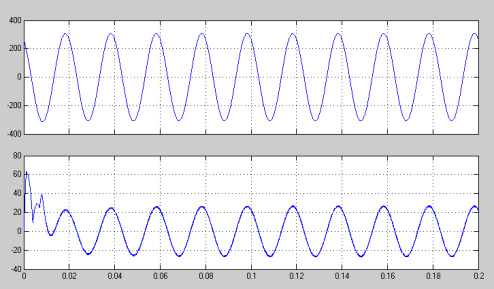
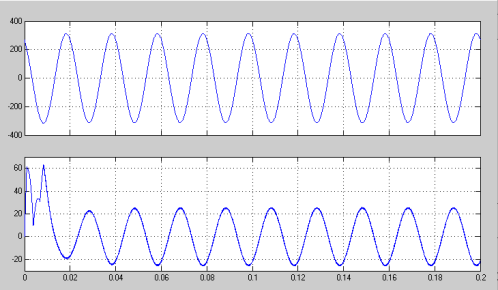
где Если принять, что Коэффициент мощности, равный единице, в такой системе, при условии, что прямое и обратное преобразование синхронизированы по фазе и частоте с напряжением сети, может быть получен при задании Ниже представлена модель MATLAB/Simulink системы управления, использующей этот принцип. Рис. 3. Система управления АВН по проекциям обобщенного вектора тока В этой системе управления блок преобразования координат «XY-ABC» осуществляет преобразование проекций Ix и Iy обобщенного вектора сетевого тока из вращающейся системы координат к трехфазной системе токов iA, iB, iC. Блок релейных регуляторов включает три канала, которые является обеспечивают гармонической формы сетевых токов. Блок управления включением/выключением АВН обеспечивает включение АВН в заданный момент времени. Рис. 4. Блок преобразования координат Рис. 5. Блок релейных регуляторов В ходе моделирования была рассмотрена работа АВН в выпрямительном и инверторном режимах. Рис. 6. Работа АВН в выпрямительном режиме Рис. 7. Работа АВН в инверторном режиме Рис. 8. Графики напряжения и тока фазы С при работе АВН в выпрямительном режиме Рис. 9. Графики напряжения и тока фазы С при работе АВН в инверторном режиме В дальнейшем, в рамках магистерской диссертации, будет проведено исследование работы активного выпрямителя напряжения в составе авиационной системы генерирования электрической энергии постоянного тока.
Похожие статьиПреобразования переменных в системах координат a, b, c и α, βпрямое преобразование координат, задание матрицы, система уравнений, система координат, график напряжений, вид матрицы, математическая модель, матричная форма, обратное преобразование координат. Исследование системы векторного управления.Такой системой координат является система координат, вращающаяся с частотой поля статора двигателя о, то есть система координат (u — v) [4]. Если динамическая модель асинхронного двигателя выполнена в системе координат (u — v), вычисление модуля вектора. Пространственные векторы в асинхронном двигателе– неподвижная система координат статора ( ); — система координат, связанная с ротором, – угол сдвига системы координат R по отношению к S, причем . . Для системы координат вращающейся с произвольной скоростью система уравнений Обзор алгоритмов управления асинхронными электроприводамиСистема управления скоростью (позицией) вращения асинхронного двигателя в косвенной форме. Рис. 2. Система управления позицией ротора косвенным методом. Блоки (ejρr) и (2→3) осуществляют трансформацию координат из вращающейся системы в фиксированную. Моделирование системы АИН ШИМ – АД с переменными ψr – Is.Рис. 6. Напряжения на входе первой ступени прямого преобразования координат. Математическая модель этих уравнений в Simulink-Matlab дана на рис. 7. Рис. 7. Первая ступень прямого преобразования координат «abc → αβ». Моделирование САР скорости системы «АИН ШИМ – АД».Обратные преобразователи координат по статорным токам с номерами 15 и 16 на Рис. 26. Обратное преобразование (2-я ступень): isα, isβ → isa, isb, isc. Шрейнер Р.Т. Системы подчиненного регулирования электроприводов: учеб. пособие / Р.Т. Шрейнер. Моделирование системы АИН ШИМ – АД с переменными во.Рис. 6. Напряжения на входе первой ступени прямого преобразования координат. Математическая модель этих уравнений в Simulink-Matlab дана на рис. 7. Рис. 7. Первая ступень прямого преобразования координат «abc → αβ». Быстрый метод пространственно-векторной широтно-импульсной.Напряжение переменного тока зависит от двух параметров: амплитуды и частоты. Первая коррекция вектора опорного напряжения. Метод синтеза гибридных систем адаптации. Применение вейвлет-преобразования для идентификации.Собрав имитационную модель узла нагрузки системы электроснабжения в Matlab и Simulink. Используя литературу [2]. Снимем с показаний осциллографа графики токов и напряжений, которые представлены на рисунке 4. |

 ,
, — модуль результирующего вектора
— модуль результирующего вектора и
и  — соответственно активная и реактивная составляющие обобщенного вектора сетевого тока и система синхронизирована относительно сетевого напряжения, то получаем систему уравнений:
— соответственно активная и реактивная составляющие обобщенного вектора сетевого тока и система синхронизирована относительно сетевого напряжения, то получаем систему уравнений: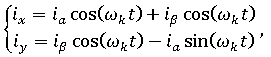
 . В этом случае справедлива система:
. В этом случае справедлива система: