Содержание
Рассмотрены различные режимы работы выводов платы Arduino и функции языка C++ для работы с этими выводами (пинами)
ВВОД-ВЫВОД
pinMode(pin, mode); — установка вывода pin на вход (INPUT) либо выход (OUTPUT)
По умолчанию цифровые выводы в Arduino предустановлены на вход, так что их нет нужды явно объявлять как INPUT с помощью pinMode().
Выводы, сконфигурированные как INPUT, подразумеваются в состоянии с высоким импедансом (сопротивлением).
Если на порт ввода не поступает сигнал, то рекомендуется задать порту известное состояние. Это делается добавлением подтягивающих резисторов 10 кОм, подключающих вход либо к питанию +5 В, либо к земле.
Микроконтроллер ATmega имеет программируемые встроенные подтягивающие резисторы 20 кОм. Программирование данных резисторов осуществляется так:
Выводы, сконфигурированные как порты вывода находятся в низкоимпедансном состоянии. Данные выводы могут пропускать через себя достаточно большой ток. Выводы микросхемы ATmega могут быть источником тока до 40 мА.
digitalRead(pin) — Считывает значение заданного цифрового вывода (pin) и возвращает результат HIGH (=1) или LOW (=0). Вывод должен быть задан либо как переменная, либо как константа (0-13).
digitalWrite(pin, value); — задает либо логический уровень HIGH, либо LOW (включает или выключает) на заданном цифровом выводе pin.
Аналоговые входы
analogRead(pin) — cчитывает значение из заданного аналогового входа (pin) с 10-битовым разрешением. Эта функция работает только на аналоговых портах (0-5). Результирующее целое значение находится в диапазоне от 0 до 1023.
Аналоговые выводы не похожи на цифровые, и нет необходимости предварительно объявлять их как INPUT или OUTPUT (если только вы не планируете использовать их в качестве цифровых портов 14-18).
analogWrite(pin, value) , где value=0-255, — записывает псевдо-аналоговое значение, используя схему с широтно-импульсной модуляцией (ШИМ, PWM), на выходной вывод, помеченный как PWM. На новом модуле Arduino с ATmega168 (328), эта функция работает на выводах 3.
Аналоговые пины как цифровые
Аналоговые входы (номера от 14 до 19) также могут использоваться как цифровые выводы портов ввода/вывода:
Выводы аналоговые входов имеют подтягивающие резисторы работающие как на цифровых выводах. Включение резисторов производится командой
digitalWrite(14, HIGH); // включить резистор на выводе аналогового входа 0
пока вывод работает как порт ввода.
После работы аналогового входа в цифровом режиме может потребоваться настроить паузу между чтением функцией analogRead() других входов.
Питание Arduino:
1) VIN. Вход используется для подачи питания от внешнего источника (в отсутствие 5 В от разъема USB или другого регулируемого источника питания). Подача напряжения питания происходит через данный вывод.
Входное напряжение (рекомендуемое): 7-12 В.
Входное напряжение (предельное): 6-20 В.
2) 5V. Регулируемый источник напряжения, используемый для питания микроконтроллера и компонентов на плате. Питание может подаваться от вывода VIN через регулятор напряжения, или от разъема USB, или другого регулируемого источника напряжения 5 В.
Цифровые выводы
Выводы платформы Arduino могут работать как входы или как выходы. Данный документ объясняет функционирование выводов в этих режимах. Также необходимо обратить внимание на то, что большинство аналоговых входов Arduino (Atmega) могут конфигурироваться и работать так же как и цифровые порты ввода/вывода.
Свойства порта вводы/вывода (pin), сконфигурированного как порт ввода
Выводы Arduino (Atmega) стандартно настроены как порты ввода, таким образом, не требуется явной декларации в функции pinMode(). Сконфигурированные порты ввода находятся в высокоимпедансном состоянии. Это означает то, что порт ввода дает слишком малую нагрузки на схему, в которую он включен. Эквивалентом внутреннему сопротивлению будет резистор 100 МОм подключенный к выводу микросхемы. Таким образом, для перевода порта ввода из одного состояния в другое требуется маленькое значение тока. Это позволяет применять выводы микросхемы для подключения емкостного датчика касания, фотодиода, аналогового датчика со схемой, похожей на RC-цепь.
С другой стороны, если к данному выводу ничего не подключено, то значения на нем будут принимать случайные величины, наводимые электрическими помехами или емкостной взаимосвязью с соседним выводом.
Подтягивающие (нагрузочные) резисторы
Если на порт ввода не поступает сигнал, то в данном случае рекомендуется задать порту известное состояние. Это делается добавлением подтягивающих резисторов 10 кОм, подключающих вход либо к +5 В (подтягивающие к питанию резисторы), либо к земле (подтягивающие к земле резисторы).
Микроконтроллер Atmega имеет программируемые встроенные подтягивающие к питанию резисторы 20 кОм. Программирование данных резисторов осуществляется следующим образом.
Подтягивающий резистор пропускает ток достаточный для того, чтобы слегка светился светодиод подключенный к выводу, работающему как порт ввода. Также легкое свечение светодиодов означает то, что при программировании вывод не был настроен как порт вывода в функции pinMode().
Подтягивающие резисторы управляются теми же регистрами (внутренние адреса памяти микроконтроллера), что управляют состояниями вывода: HIGH или LOW. Следовательно, если вывод работает как порт ввода со значением HIGH, это означает включение подтягивающего к питанию резистора, то конфигурация функцией pinMode() порта вывода на данном выводе микросхемы передаст значение HIGH. Данная процедура работает и в обратном направлении, т.е. если вывод имеет значение HIGH, то конфигурация вывода микросхемы как порта ввода функцией pinMode() включит подтягивающий к питанию резистор.
Примечание: Затруднительно использовать вывод микросхемы 13 в качестве порта ввода из-за подключенных к нему светодиода и резистора. При подключении подтягивающего к питанию резистора 20 кОм на вводе будет 1.7 В вместо 5 В, т.к. происходит падение напряжения на светодиоде и включенном последовательно резисторе. При необходимости использовать вывод микросхемы 13 как цифровой порт ввода требуется подключить между выводом и землей внешний подтягивающий резистор.
Свойства порта ввода/вывода, сконфигурированного как порт вывода
Выводы, сконфигурированные как порты вывода, находятся в низкоимпедансном состоянии. Данные выводы могут пропускать через себя достаточно большой ток. Выводы микросхемы Atmega могут быть источником (положительный) или приемником (отрицательный) тока до 40 мА для других устройств. Такого значения тока достаточно чтобы подключить светодиод (обязателен последовательно включенный резистор), датчики, но недостаточно для большинства реле, соленоидов и двигателей.
Короткие замыкания выводов Arduino или попытки подключить энергоемкие устройства могут повредить выходные транзисторы вывода или весь микроконтроллер Atmega. В большинстве случаев данные действия приведут к отключению вывода на микроконтроллере, но остальная часть схемы будет работать согласно программе. Рекомендуется к выходам платформы подключать устройства через резисторы 470 Ом или 1 кОм, если устройству не требуется больший ток для работы.
Для взаимодействия с окружающим миром нужно настроить выводы микроконтроллера на приём или передачу сигнала. В результате каждый пин будет работать в режиме входа и выхода. На всеми любимой плате Arduino сделать это можно двумя способами, как именно вы узнаете из этой статьи.
Способ первый – стандартный язык для Arduino IDE
Всем известно, что Ардуино программируется на C++ с некоторой адаптацией и упрощениями для новичков. Он называется Wiring. Изначально все порты ардуино определяются как входы, и нет нужды задавать это в коде.
Порты обычно прописываются в функции инициализации переменных:
Для этого используется команда pinMode, у неё достаточно простой синтаксис, сначала указывается номер порта, затем его роль через запятую.
pinMode (nomer_porta, naznachenie)
С помощью этой команды внутренняя схема микроконтроллера конфигурируется определенным образом.
Есть три режима в которых может работать порт: INPUT – вход, в этом режиме происходит считывание данных с датчиков, состояния кнопок, аналогового и цифрового сигнала. Порт находится в т.н. высокоимпедансном состоянии, простыми словами – у входа высокое сопротивление. Устанавливается это значение, на примере 13 пина платы, при необходимости так:
pinMode (13, INPUT);
OUTPUT – выход, в зависимости от команды прописанной в коде порт принимает значение единицы или нуля. Выход становится своего рода управляемым источником питания и выдаёт максимальный ток (в нашем случае 20 мА и 40 мА в пике) в нагрузку к нему подключенную. Чтобы назначить порт как выход на Arduino нужно ввести:
pinMode (13, OUTPUT);
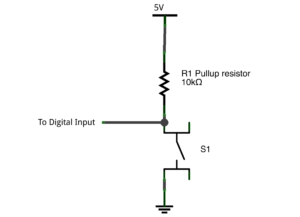
INPUT_PULLUP – порт работает как вход, но к нему подключается т.н. подтягивающий резистор в 20 кОм.
Условную внутреннюю схему порта в таком состоянии вы видите ниже. Особенностью этого входа является то, что входной сигнал воспринимается как проинвертированный («единица» на входе воспринимается микроконтроллером как «ноль»). В таком режиме вы можете не использовать внешние подтягивающие резисторы при работе с кнопками.
pinMode (13, INPUT_PULLUP);
Данные принимаются с портов и передают на них командами:
digitalWrite(пин, значение) – переводит выходной пин в логическую 1 или 0, соответственно на выходе появляется или исчезает напряжение 5В, например digitalWrite (13, HIGH) – подаёт 5 вольт (логическую единицу) на 13 пин, а digitalWrite (13, low) – переводит 13 пин в состояние логического ноля (0 вольт);
digitalRead(пин) – считывает значение со входа, пример digitalRead (10), считывает сигнал с 10 пина;
analogRead(пин) – считывает аналоговый сигнал с аналогового порта, вы получаете значение в диапазоне от 0 до 1023 (в пределах 10-битного АЦП), пример analogRead (3).
Способ два – управление портами через регистры Atmega и ускорение работы кода
Такое управление конечно простое, но в этом случае есть два недостатка – большее потребление памяти и низкое быстродействие при работе с портами. Но вспомните что такое Arduino независимо от варианта платы (uno, micro, nano)? В первую очередь, это микроконтроллер AVR семейства ATMEGA, в последнее время используется МК atmega328.
В Arduino IDE вы можете программировать на родном для этого семейства языке C AVR, так, как если бы вы работали с отдельным микроконтроллером. Но обо всем по порядку. Чтобы управлять портами Ардуино таким образом вам нужно сначала внимательно рассмотреть следующую иллюстрацию.
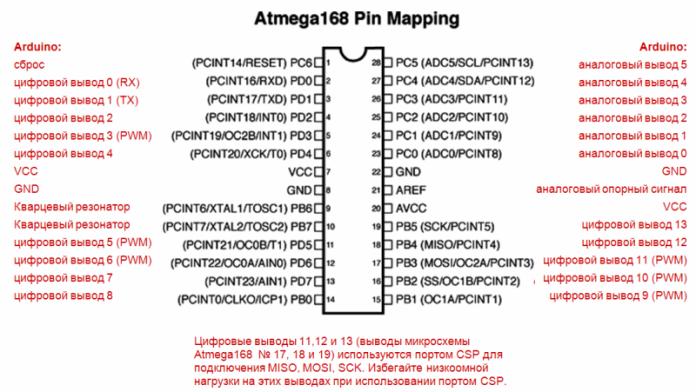
Возможно кому-то будет нагляднее изучать порты в таком виде (на рисунке тоже самое, но в другом оформлении):
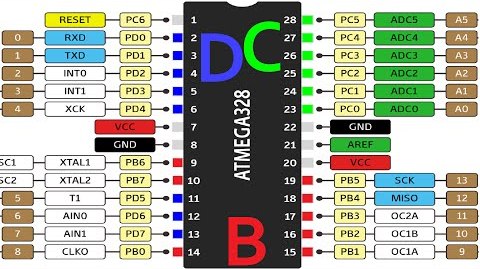
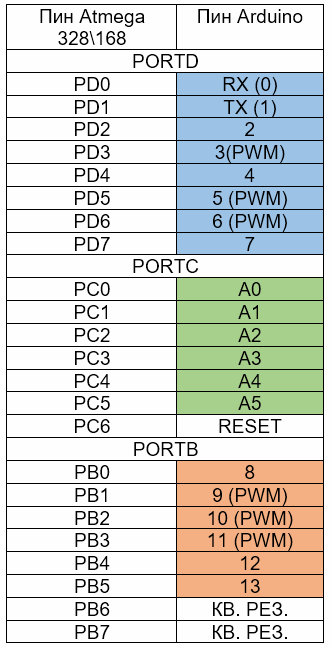
Здесь вы видите соответствие выводов Ардуино и названий портов атмеги. Итак, у нас есть 3 порта:
Исходя из изображенного на рисунках, я составил таблицу соответствия портов Ардуино и Атмеги, она пригодится вам в дальнейшем.
У Atmega есть три регистра длиной в 8 бит, которые управляют состоянием портов, например, порта B разберемся в их назначении проведя аналогии со стандартными средствами wiring описанными в начале статьи:
PORTB – Управление состоянием вывода. Если пин находится в режиме «Выхода», то 1 и 0 определяют наличие этих же сигналов на выходе. Если же пин находится в режиме «Входа», то 1 подключает подтягивающий резистор (тоже что и INPUT_PULLUP рассмотренный выше), если 0 – высокоимпедансное состояние (аналог INPUT);
PINB – регистр чтения. Соответственно в нём находится информация о текущем состоянии выводов порта (логическая единица или ноль).
DDRB – регистр направления порта. С его помощью вы указываете микроконтроллеру чем является порт – входом или выходом, при этом «1» – выход, а «0» – вход.
Вместо буквы «В» может быть любая другая согласно названиям портов, например, PORTD или PORTC аналогично работают и другие команды.
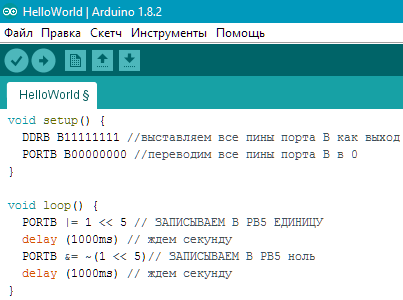
Помигаем светодиодом, заменим стандартную функцию digitalWrite(). Для начала вспомним как выглядит исходный пример из библиотеки Arduino IDE.
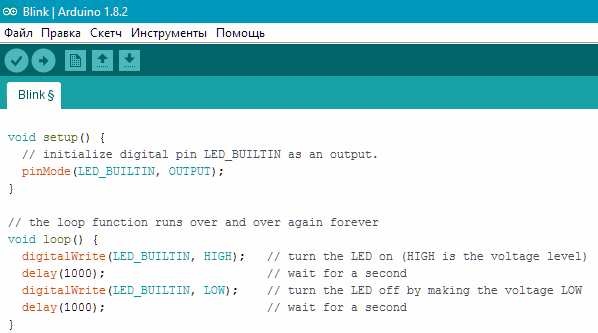
Это код всем известного «blink», который демонстрирует мигание светодиодом, встроенным в плату.
В комментариях даны пояснения к коду. Логика такой работы заключается в следующем.
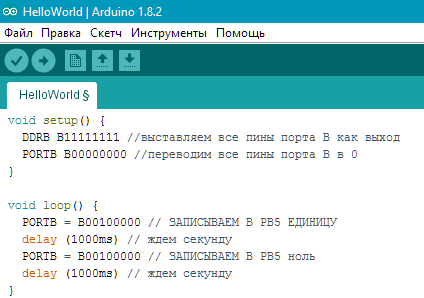
Команда PORTB B00100000 переводит PB5 в состояние логической единицы, смотрим, а те картинки и таблицу что расположены ниже и видим, что PB5 соответствует 13 пину Ардуины.
Буква «В» перед цифрами говорит о том, что мы в записываем значения в двоичном виде. Нумерация в двоичном коде идёт справа налево, т.е. здесь единица стоит в шестом с правого края бите, что говорит микроконтроллеру о взаимодействии с состоянием шестого бита регистра порта B (PB5). В таблице ниже изображена структура порта D, она аналогична и приведена для примера.

Вы можете задавать значение не в двоичном, а в шестнадцатеричном виде, например, для этого открываем калькулятор windows и в режиме «ВИД», выбираем вариант «Программист».
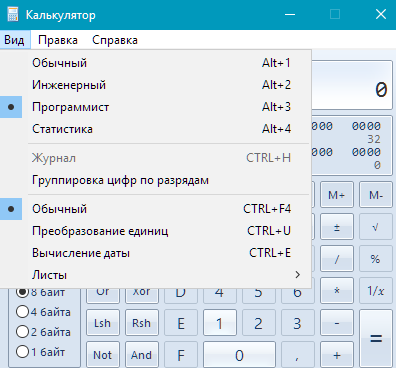
Вводим желаемое число:
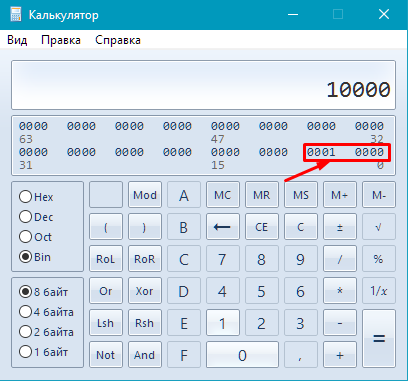
И нажимаем на HEX:
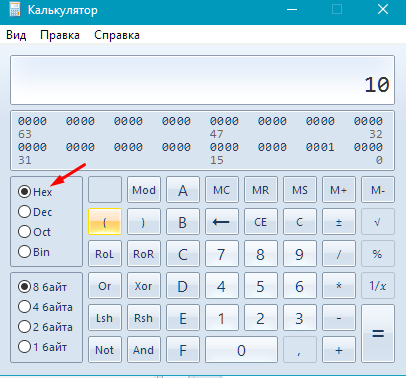
В таком случае переносим это всё в Arduino IDE, но уже вместо приставки «В» будет «0х».

Но при таком вводе возникает проблема. Если у вас к другим пинам подключено что-либо, то внося команду типа B00010000 – вы все выводы кроме 13 (PB5) обнулите. Вы можете вносить данные на каждый пин по отдельности. Это будет выглядеть следующим образом:
Такая запись может показаться непонятной, давайте разберемся.
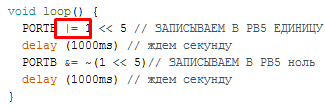
Это операция логического сложения, |= значит прибавить к содержимому порту что-либо.
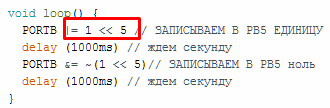
А это значит, что нужно сложить слово из 8 бит в регистре с единицей, смещенной на 5 бит – в результате, если было 11000010 получается 11010010. На этом примере видно, что изменился только PB5, остальные биты этого регистра остались без изменений, как и остались неизменными состояния выводов микроконтроллера.
Но при логическом сложении возникает проблема – вы не можете превратить единицу в ноль, потому что:
Нам на помощь придёт логическое умножение и инвертирование:
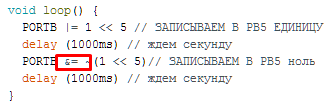
&= значит умножить содержимое порта на определенное число.
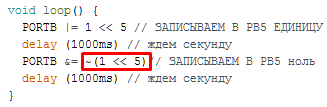
А это число, на которое мы умножает. Знак «
» обозначает инвертирование. В нашем случае проинвертированная единица является нулем. То есть мы умножаем содержимое порта на ноль, сдвинутый на 5 бит. Например, было 10110001, стало 10100001. Остальные биты остались без изменений.
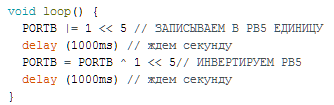
Тоже самое можно сделать с помощью операции инвертирования (^):
Чтение с портов, аналог digitalRead() выполняют с помощью регистра PIN, на практике это выглядит так:
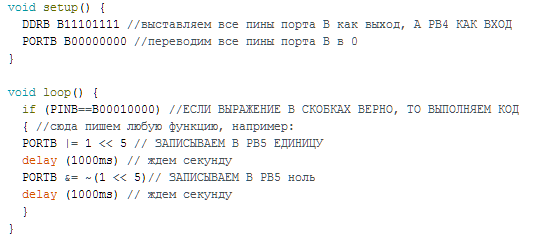
Здесь мы проверяем равно ли выражение в скобках реальному состоянию портов, т.е. аналогично тому, если бы мы написали if (digitalRead(12) == 1).
Заключение
Для чего такие сложности с управлением портами, если можно использовать стандартные удобные функции? Всё дело в быстродействии и размерах кода. При использовании второго способа, рассмотренного в статье размер кода, значительно снижается, а быстродействие увеличивается на несколько порядков. Стандартный digitalWrite() выполнялся за 1800 мкс, а запись прямо в порт за 0,2 мкс, а digitalRead() за 1900 мкс, а стал также за 0,2 мкс. Этот способ управления был найден на просторах сети и часто встречается в коде готовых проектов.
