Содержание
Подмотка, Кан накрутка, Крутилки, Намотка Can, Моталка спидометра, Can подмотка, Намотка одометра, Шумахеры, Корректор одометра и многие другие названия Вы слышали для этого полезного устройства!
В этом разделе хочу поделиться с Вами некоторыми знаниями о моталках. Если Вы это читаете, значит хотите сэкономить на покупке устройства , собрав его самостоятельно! Итак, начнём! Примерная схема аналоговой намотки ( их существует огромное количество )

Все детали для сборки можно приобрести в любом радиомагазине или заказать через интернет. Но есть нюанс, на каждом авто свои места и способы подключения. Для неосведомлённого в данной сфере человека, найти способ и место подключения, представится задачей повышенной сложности. Для многих и вовсе не разрешимой. Первые мои намотки собирались на платке с использованием деталей в DIP корпусе и выглядели хоть и стрёмно, но практично работают до сих пор !

Сейчас предлагаемая мной намотка собирается на плате с использованием SMD деталей и внутри всё качественно защищено от повреждений и вредного воздействия влаги слоем компаунда. Эта подмотка подходит на все автомобили с датчиком скорости, как легковые, так и грузовые.



Схема CAN намотки (когда-то сам искал) есть везде и это не секрет, самая простая выглядит так

Сами девайсы у меня выглядят так




Вариантов схем много на любой вкус, есть и сложнее, но везде есть микроконтроллер (это как миниатюрный компьютер) который посылает в шину CAN определённую информацию с нужной частотой и скоростью, основой, а точнее самой значимой частью, является прошивка, которая заливается в микроконтроллер намотки, все изготовители держат её в строгом секрете (этот секрет можете купить у меня) . Информация, передаваемая в шину для каждого авто своя и она также держится в секрете. Добыть её можно любым анализатором CAN шины (я пользуюсь CAN-Hacker). Для тех, кто думает, что это легко и просто представлю вам видео, на котором показана работа анализатора и будьте осторожны подбором можно с легкостью УЛОЖИТЬ панель и не только !
Также расскажу немного о главном, прошивка, записанная в микроконтроллер, только даёт команду для вывода в шину информации, которая записывается Eeprom, туда записываем Id (имя определённого блока авто, можно сказать, это имя одометра), Data (информация в которой говорится с какой скоростью движется авто), период передаваемой информации, скорость шины. Также возможно ограничить работу намотки по времени ( по окончании времени она просто отключится и становится обычной «пластмассой с детальками» ) так заполняется Eeprom для pic контроллера.

Всем спасибо, надеюсь эта информация для Вас была полезна.

Оглавление
1. Работа устройства.
Вставьте устройство в диагностический разъём, загорится красный светодиод, сигнализируя о подачи питания на устройство.
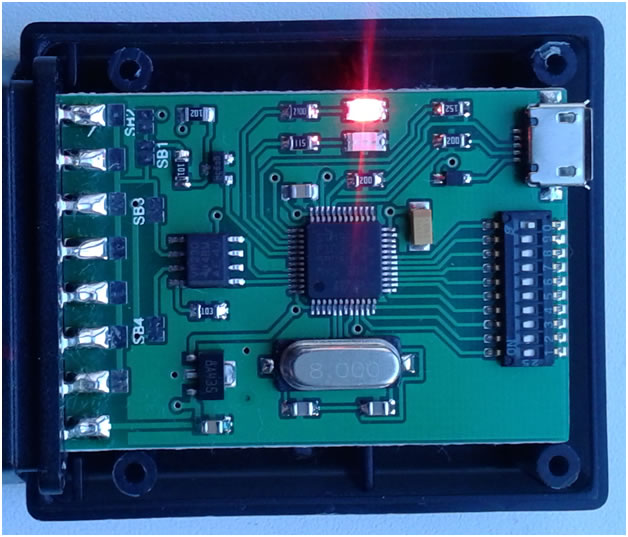
Рис. 1. Индикация подачи питания на устройство.
Включите зажигание, после того как устройство обнаружит CAN шину, красный светодиод погаснет, и начнет мигать зеленый светодиод, с частотой одна вспышка в секунду.
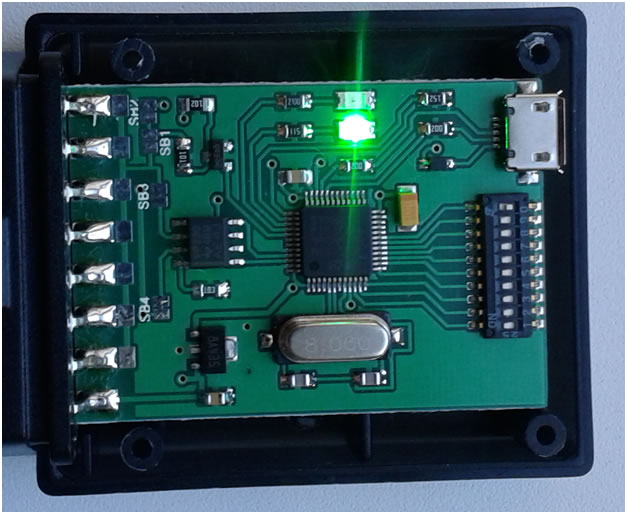
Рис. 2. Устройство обнаружило CAN шину автомобиля.
2. Выбор авто
Для того чтобы, запрограммировать устройство под конкретный автомобиль, нужно установить переключатели согласно порядковому номеру из списка автомобилей. Рассмотрим пример программирования устройства для автомобиля Chevrolet Aveo. Открываем список автомобилей и смотрим порядковый номер автомобиля Chevrolet Aveo (Рис. 1).

Рис. 3. Порядковый список автомобилей.
Нужный нам автомобиль находится под 164 порядковым номером. Дело в том что порядковый номер автомобиля, имеет десятичный формат, а переключатель у нас двоичный. Поэтому устанавливать в переключатель, будем двоичное представление числа 164. Как переводить десятичные числа в двоичные будет рассказано позже.
Из предпоследней колонки таблицы (Установка переключателей), берём двоичное представление числа 164 (368 двоичное), и устанавливаем джемперы согласно двоичного значения.
3-6-8 включаем (положение ON), а все остальные выключаем, смотри Рис. 2.
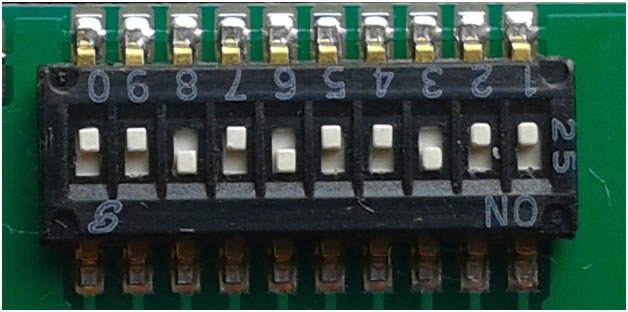
Рис. 4. Установка переключателей Chevrolet Aveo (3-6-8 Включ.).
3. Установка устройства на немецкие автомобили.
Для того чтобы установить устройство на автомобиль немецкого производства, нужно вывести моторную CAN шину, на свободные контакты (pin 3-11 или pin 2-10), диагностического разъёма автомобиля (Рис. 6).
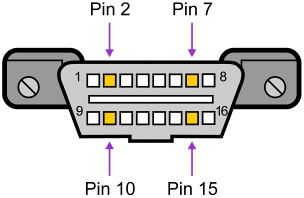
Рис. 5. Диагностический разъём автомобиля (OBDII).
Далее нужно разобрать устройство, открутить четыре болта. Затем берём канцелярский нож, и разрезаем перемычки 6 и 14. Смотри Рис. 4, на рисунке место разреза обведены красными кружками.
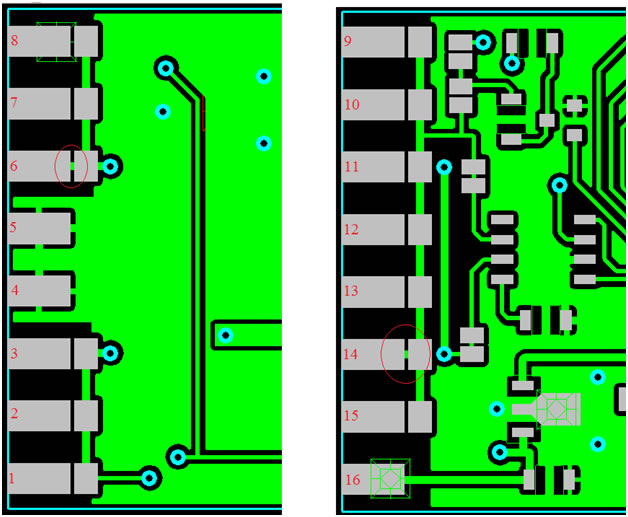
Рис. 6. Перекоммутация CAN шины на другие контакты OBDII.
Следующим шагом доработываем автомобиль. Выводим моторную CAN шину, на свободные контакты разъёма OBDII. Задействуем свободные (неиспользуемые изготовителем), обычно эта пара 2-10 или 3 -11. Доработке автомобиля будет посвящен отдельный документ-описание, сейчас просто приведу рисунок доработки.

Рис. 7. Подключение моторной CAN шины автомобиля Mercedes.
После того как, был доработан автомобиль, нам осталось только припаять выводы CAN шины (CAN_L, CAN_H). Разогреваем паяльник, и припаиваем 2 и 10 контакт OBDII. На рисунке это два серых овала. Всё, устройство готово к работе.
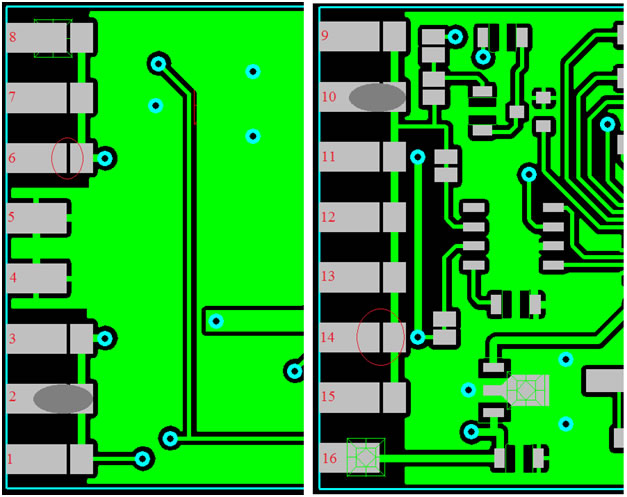
Рис. 8. Припайка 2 и 10 контакта шины.
4. Обновление устройства через USB.
Для того чтобы обновить устройство, нужно перевести все джемперы переключателя в положения ВКЛ.(ON). Затем соединяем USB кабелем устройство и компьютер. Когда система определит новое устройство, в проводнике операционной системы Windows новый съёмный диск. Смотри рисунок.
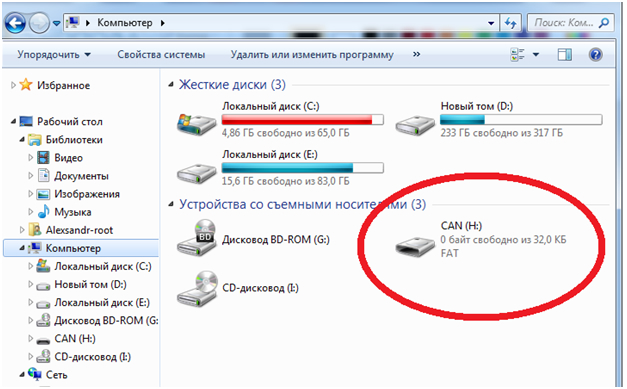
Рис. 9. Съёмный диск CAN(Н:).
Открываем диск и видим в нем файл прошивки. Перетаскиваем его мышкой в корзину (удаляем).
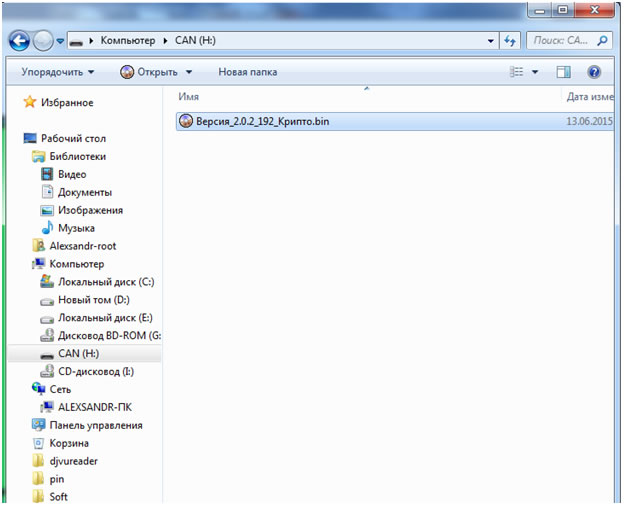
Рис. 10. Версия прошивки устройства.
Берем свежую версию прошивки, и просто перетаскиваем мышкой, в наш съёмный диск (копируем). Всё процесс обновления устройства закончен. На рисунке видно как мы заменили прошивку 2.0.2 на болеё свежую 2.0.3
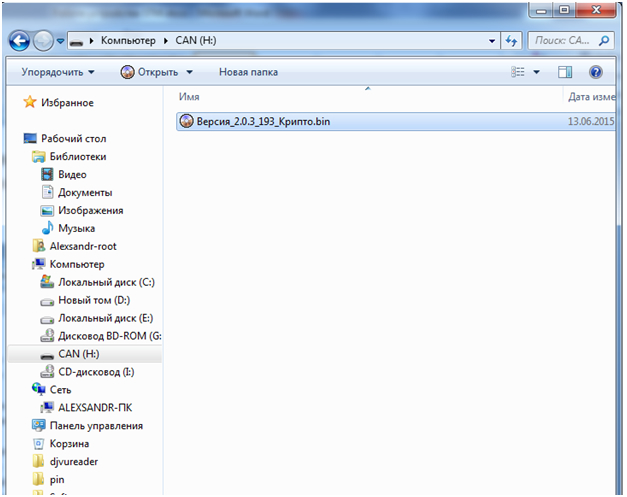
Рис. 11. Обновленная версия прошивки.
5. Добавление новых автомобилей в устройство.
5.1 Первый режим – циклическая передача сообщений.
Предпологается что пользователь устройства умеет пользоваться CAN хакером, умеет читать шину и находить нужные сообщения. Повторяем действие четвертой главы, только файл обновлять не будем, а просто его откроем. Для открытия файла нам понадобится HEX редактор, который умеет работать с бинарными файлами. На просторах интернета много бесплатных редакторов, скачивать можно любой разницы нет. И так открываем редактор и указываем путь к файлу прошивки.
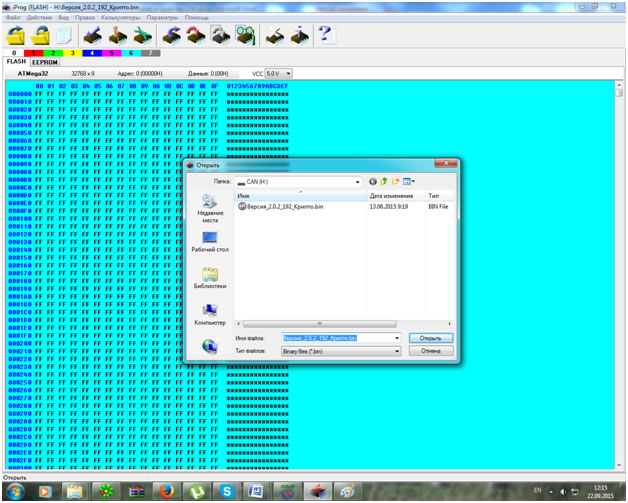
Рис. 12. Открываем в редакторе прошивку.
После того как мы открыли прошивку, в дампе редактора видим тело прошивки, HEX формате (шестнадцатеричное представление десятичного числа).
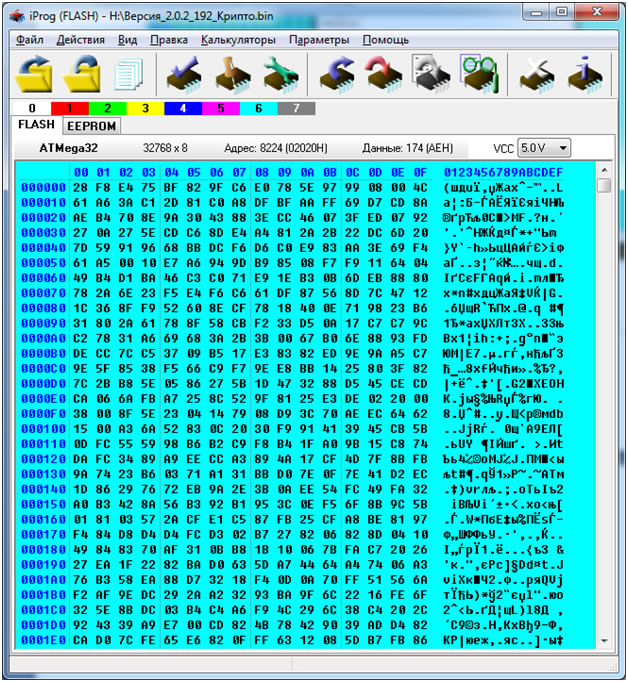
Рис. 13. Редактор с дампом прошивки устройства.
Опускаем оконный ползунок вниз (обведен на рисунке красным кружком). Останавливаем ползунок в конце прошивки. Там где заканчиваются данные и начинается пустое поле с нулями – это и есть конец прошивки. Смотри рисунок ниже.
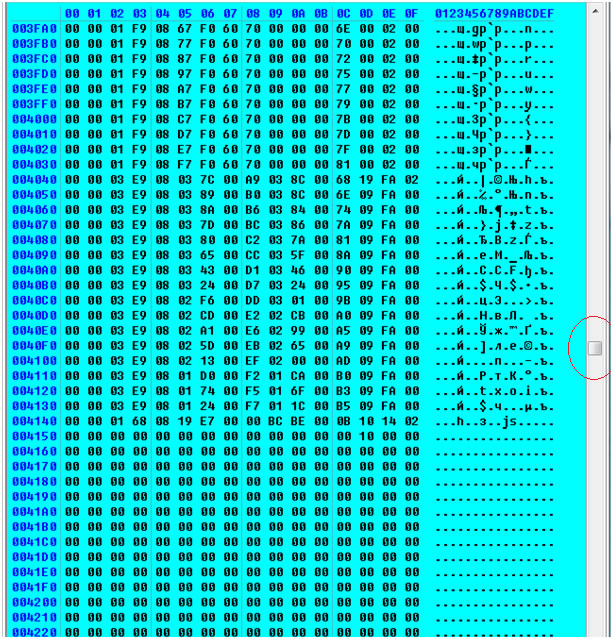
Рис. 14. Конец прошивки устройства.
Теперь разберемся с форматом одиночного сообщения. Данные нужно вводить в hex формате. Разберем пример, сообщение
ID – 111 , DLC – 8 , DATA – 00 00 00 00 00 00 00 00 , Период – 2 ms . Смотри Рис. 15.
красный прямоугольник 4 байта – поле ввода ID сообщения, причем вводить можно как обычные (11бит) так и расширенные (29бит), программа сама определит тип ID, и передаст сообщение с нужными параметрами.
зеленый прямоугольник 1 байт – поле ввода DLC – количество байт в передаваемом сообщении, этот параметр может находится в диапазоне 0 – 8.
синий прямоугольник 8 байт – поле ввода DATA собственно данные CAN сообщения, передаваться будут только такое количество байт, которое указанно в поле DLC, остальные будут игнорироваться.
желтый прямоугольник 1.5 байта – поле ввода Период время через которое будет передано следующие сообщение, единицы измерения миллисекунды, значение прописывается в HEX формате, например 23hex – 35 миллисекунды
серый прямоугольник 1 байт – поле ввода Скорость Намотки, скорость деленная /100. Количество намотанных километров на спидометре автомобиля, за один час работы устройства. Данный параметр является не обязательным. Например значение 02 означает, что час работы, спидометр увеличит показание на 200км.
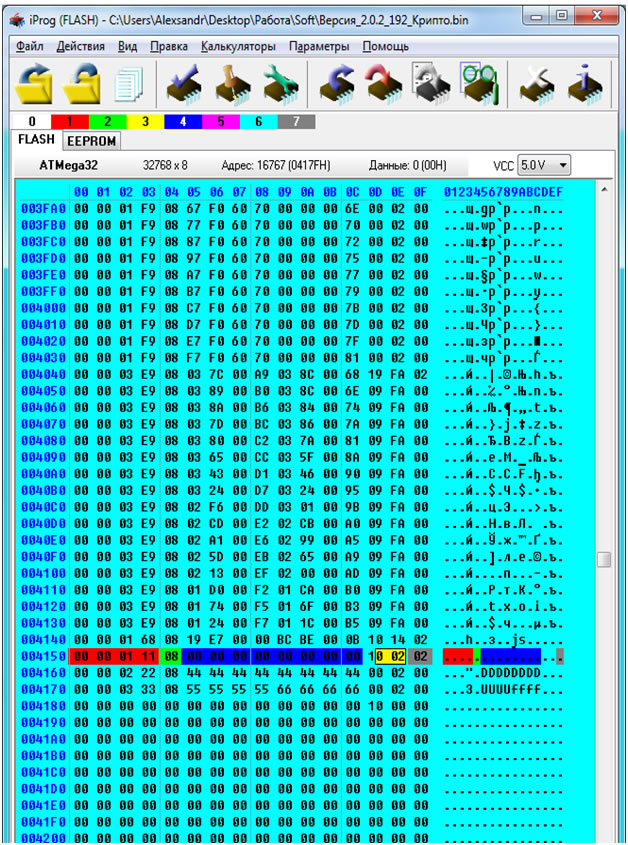
Рис. 15. Формат одиночного сообщения.
Устройство может передавать, одно или несколько сообщений. Количество сообщений, ограниченно только размером свободной памяти. Версия прошивки 2.0.2 _ 192. Список содержит 192 машины, добавленная машина будет под 193 номером. Передаваемый пакет (пример) содержит три сообщения.
ID – 111, DLC – 8, DATA – 00 00 00 00 00 00 00 00, Период – 2 ms.
ID – 222, DLC – 8, DATA – 44 44 44 44 44 44 44 44, Период – 2 ms.
ID – 333, DLC – 8, DATA – 55 55 55 55 66 66 66 66, Период – 2 ms.
Устройство передаёт первое сообщение, затем пауза 2ms. После паузы устройство передаёт второе, затем опять пауза 2ms. После паузы устройство передаёт третье, затем опять пауза 2ms. Затем цикл повторяется с начала (с первого сообщения).
Теперь разберемся как устройство, определяет с какого сообщения начинать передавать пакет, и на каком сообщении заканчивать передачу пакета. Выделенная красным квадратиком 1, указывает устройству, что это первое сообщение. Смотри рисунок на следующей странице. Дальше устройство перемещается на строку ниже и смотрит, если под этой единичкой стоит 0, значит это сообщение, из этого пакета, и устройство передает его. Затем процесс повторяется (спускается на строку ниже). Процесс будет продолжатся до тех пор, пока устройство не найдет 1. Строка с 1 будет относится к следующему передаваемому пакету. Поэтому это строка пропускается, и устройство подымается вверх к первому сообщению, и затем процесс повторяется.
Важно. Мы добавили 193 сообщение, обязательно за ним нужно добавить 194(можно пустое), иначе устройство не найдет последнее сообщение пакета. Если мы не добавим 194 сообщение, то после передачи наших трех сообщений, устройство перейдет на строку ниже и начнет передавать пустое сообщение, затем опять на строку ниже, и т. д..
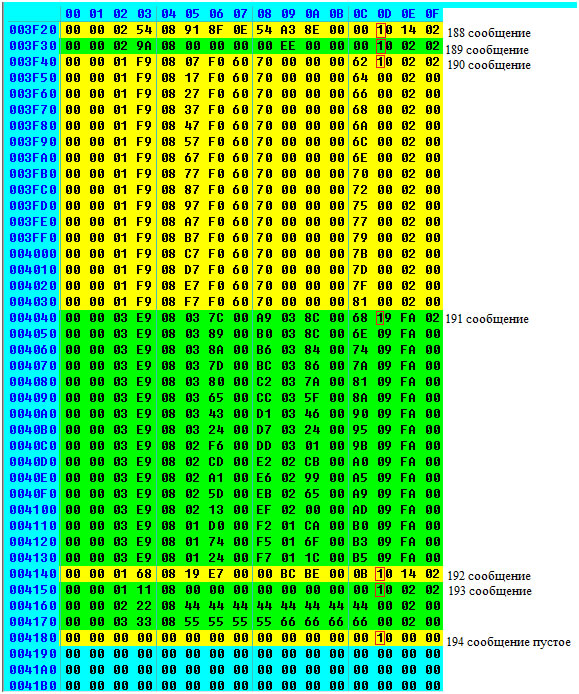
Рис. 16. Пакеты сообщений 188 – 194.
Нажимаем кнопку сохранить, выставляем на переключателе код 193 посылки. Отсоединяем USB шнур, и подключаем к устройству CAN хакер. В окне CAN хакера мы наблюдаем приём трех, раннее запрограммированных сообщений.
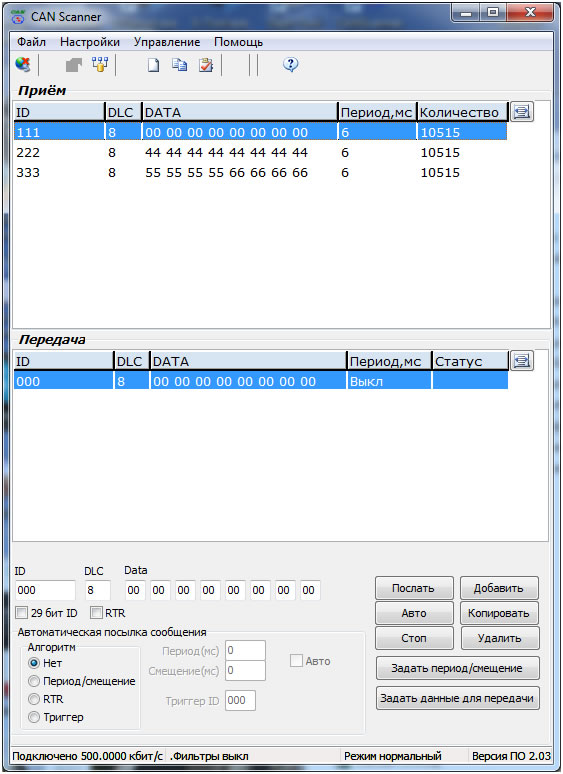
Рис. 17. Приём трех запрограммированных сообщений.
5.2 Второй режим – триггер (автоответ).
Режим автоответа в этой версии прошивки (2.0…), пока не реализован. Реализация режима будет в версии прошивки (2.1… и выше).
Чтобы включить второй режим – в третьем байте с конца прописываем 2 (смотри рисунок ниже, 2 обведена красным квадратом). В режиме триггер, нет поля период. Устройство слушает CAN шину автомобиля. Как только в шине автомобиля, появляется сообщение, с нужным нам ID (в примере 200), устройство сразу посылает запрограммированное сообщение.
ID – 200 , DLC – 8 , DATA – 01 23 45 67 89 AB CD 00 .
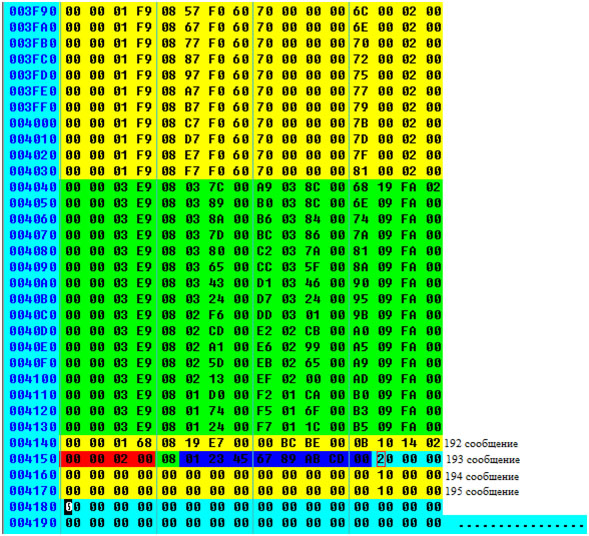
Рис. 18. Второй режим(триггер).
5.3 Третий режим – инкремент.
Чтобы включить третий режим – в третьем байте с конца прописываем 3 (смотри рисунок ниже, 3 обведена красным квадратом).
Передаваемый пакет содержит две строчки. Формат первой строчки стандартный смотри пример. Вторая строка – это строка инкремента. Как видно из примера, каждый раз при передачи сообщения, к полю DATA будет прибавляется значения инкремента.
1. Первый байт увеличится на единицу.
2. Второй на двойку
3. Третий на тройку
4. Четвертый на четверку
5. Пятый на пятерку
6. Шестой на семерку
7. Седьмой на семерку
8. Восьмой на нуль
ID – 01234567 , DLC – 8 , DATA – 01 23 45 67 89 AB CD 00 , Период – 2 ms .
Инкремент – 01 02 03 04 05 06 07 00
Нулевые значении второй строчки 193 сообщения (зеленные на рисунке), являются не значимые.
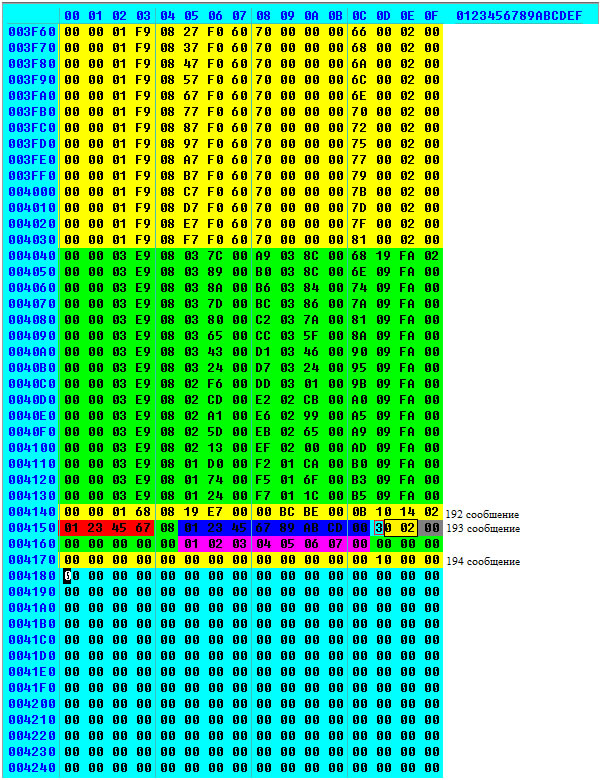
Рис. 19. Формат сообщения третьего режима.
Устанавливаем код 193, и подключаем CAN хакер, и проверяем правильность введенных дынных.
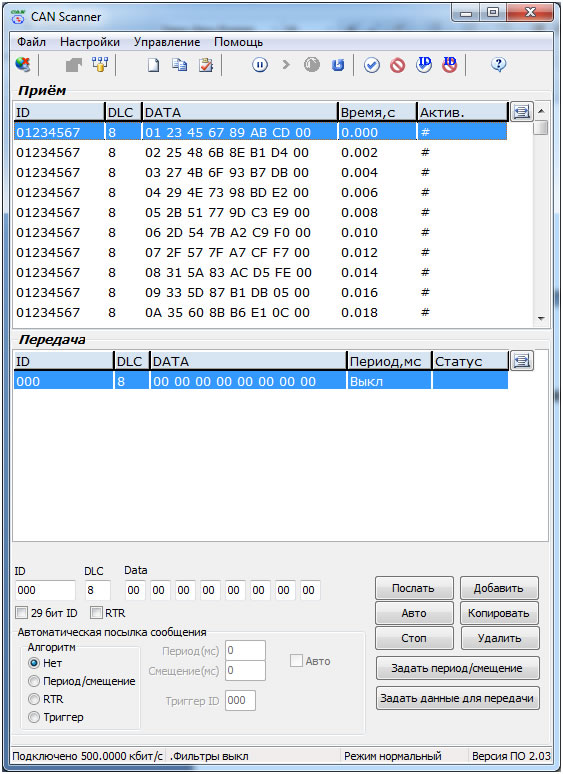
Рис. 20. Третий режим – инкремент.
5.4 Настройка скорости передачи данных по шине CAN
Пакеты информации в автомобильной шине CAN, могут передаваться с разными скоростями. Скорость CAN это – число битов, переданное от передатчика к приёмнику, за одну секунду. С какой скоростью будут передаваться информация в шине CAN, решает производитель автомобиля. Наиболее популярная скорость CAN шины 500 kBit/сек. На эту скорость по умолчанию настроен прибор. Но встречаются автомобили, у которых шина работает на других скоростях. Прибор может передавать пакеты на шести различных скоростях(500,250,200,125,100,50 kBit/сек.). Информация записанная в пятом байте, отвечает за скорость и DLC. Причем скорость прописана в старшей половине байта, а в младшей прописан параметр DLC. Например – если нужно передавать пакет со скоростью 250 kBit, записываем в старшую половину пятого байта 1, если 200 kBit записываем 2 (смотри таблицу).
0 – 500 kBit
1 – 250 kBit
2 – 200 kBit
3 – 125 kBit
4 – 100 kBit
5 – 50 kBit
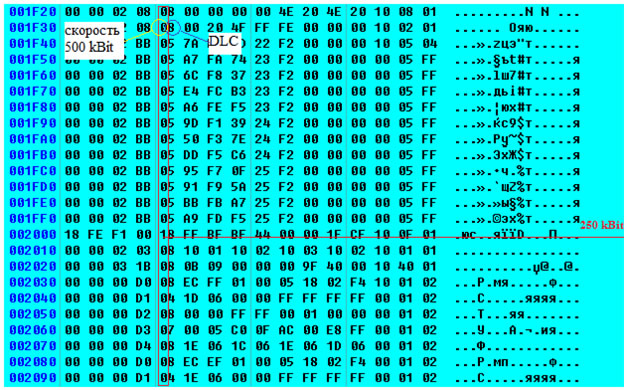
Рис. 21. Настройка скорости передачи пакета CAN.
6. Перевод десятичного числа в двоичное.
Для того чтобы, перевести порядковый номер из десятичного формата в двоичный, воспользуемся калькулятором из стандартных программ, которые поставляются в комплекте с операционной системой windows. Калькулятор переключаем в режим программист, вкладка вид поле программист (Рис. 22). Далее вводим номер автомобиля в десятичном формате и переключаем радио кнопку из положения Dec в положение Bin (Рис. 23). И получаем число 164 в bin формате 10100100.
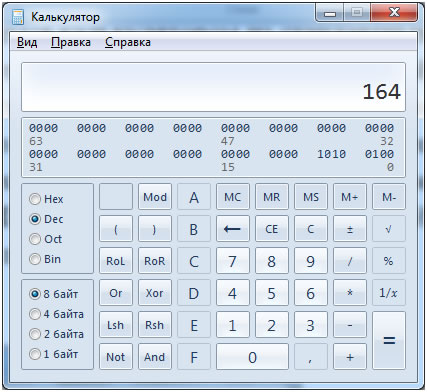
Рис. 22. Ввод числа 164 в десятичном формате.
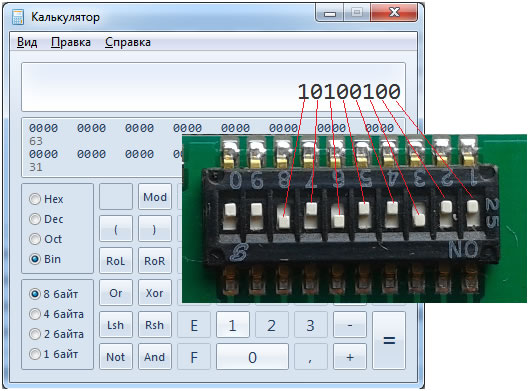
Рис. 23. Перевод числа 164 в двоичный формат.
Теперь нам потребуется установить джемперы мульти- переключателя, в соответствии с битами двоичной комбинации числа 164 (Рис. 24).
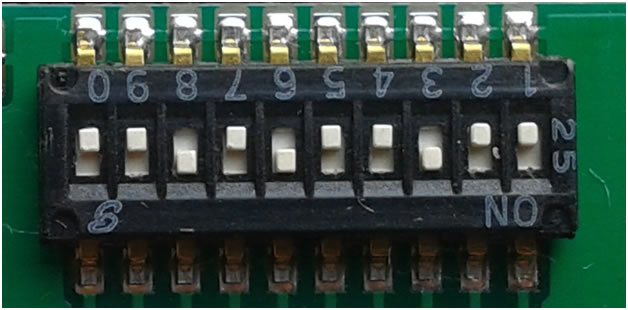
Рис. 24. Установка мульти переключателя Chevrolet Aveo. 3-6-8 Вкл.
Для того чтобы заняться CAN подмоткой Вам необходимо будет вооружиться:
1. Портативным персональным компьютером.
Для этого подойдёт любой бюджетный ноутбук.
2. CAN сканер или CAN хакер.
В сети Интернет Вы найдёте множество подобных устройств от самых примитивных до более мощных как в плане программного обеспечения, так и самого железа.
Непосредственно данное устройство можно приобрести на нашем сайте . Сканер предназначен для мониторинга CAN шины в реальном времени. Программа сканера позволяет выводить данные в следующем формате:
Как видно можно принимать сообщения с простым ID – 11 бит или с расширенным ID – 29 бит.
Кроме того, можно передавать в сеть шины CAN до 16 сообщений однократно или в автоматическом режиме. Данные водятся в следующем формате:
В следующих статьях мы рассмотрим более детально работу CAN сканера, представленного на нашем сайте:
3. Программатор для PIC микроконтроллеров.
Программатор PICkit2 – для внутрисхемного программирования при условии, что изготовление моталок основано на PIC микроконтроллере. Внешний вид программатора:
Также можно использовать программатор IE-PX-700 для PIC и dsPIC микроконтроллеров фирмы Microchip:
4. Сами устройства CAN моталки спидометра автомобиля.
Ниже представлена принципиальная электрическая схема CAN подмотки:
Непосредственно данное устройство можно приобрести на нашем сайте как в готовом виде под конкретную марку автомобиля, так и в виде конструктора.
Вот, в принципе, и всё, что понадобится для занятия CAN подмотками.
Тем не менее, если пункт 1, 2 и 3 – это только деньги, т.е. нет проблем приобрести, то вот по 4 пункту тут не всё так просто. Для начала нужно сделать печатную плату, куда будет всё паяться. Размеры печатной платы должны соответствовать размерам коннектора OBD-II.
И, самое главное, – это написать программу для Вашей моталки. Если опыта в написании программ на языке программирования Си или Ассемблер недостаточно или вовсе отсутствует, то целесообразнее приобрести CAN конструктор. Конструктор уже полностью спаян, и в память программ занесена программа передатчика CAN сообщений. В конструктор лишь остаётся прописать с помощью соответствующего программатора нужные сообщения с определённым ID адресом, содержимым и периодом передачи.