Содержание
Крепление электродвигателя
Начало работы с электродвигателем – это непосредственный монтаж прибора и его дальнейшая эксплуатация в закрепленном положении. Двигатель любого типа может использоваться как в промышленных агрегатах, так и в любых других видах систем, однако способ монтажа приборов может оказаться одним и тем же. Узнать, как определить способ крепления механики, можно ниже.
Указанная информация подходит для следующих типов электродвигателей:
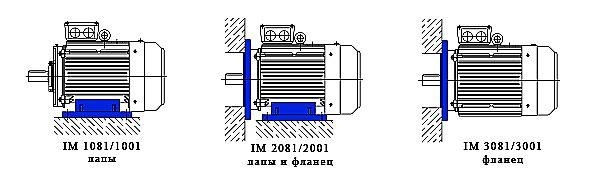
Эл двигатель на лапах – вариант исполнения двигателя, напр. IM1081. Представленные части – элемент крепежа с отверстиями.
Фланец на электродвигатель – крепежный элемент двигателя. В стандартном варианте «поддерживает» установку в любом положении (верх/низ).
Комби-тип (комбинированный) – подвид устройства, включающий в себя как лапы, так и фланец.
Определяем тип крепления электродвигателя
Таблица 1. Наименование типа крепления электродвигателя и его краткое описание
(лапы/фланец/комби).
Номер IM:
3631
3611
3601 (3681)
3031
3011
3001 (3081)
2131
1002, 2002, 3002 и т.д.
2111
2101 (2181)
2031
2011
2001 (2081)
1031
1011
1001 (1081)
1 – Фланец положение вала вверх
2 – Фланец положение вала вниз
3 – Комби (фланец + лапы) валом вниз
4 – Комби (фланец + лапы) валом вверх
5 – Фланец
6 – Лапы (установка валом вверх)
7 – Лапы (установка валом вниз)
8 – Комби
9 – Лапы
* – Малый фланец
Как расшифровать маркировку электродвигателя?
IM XXXX – это составной шифр, где первые 2 буквы – это указание на монтажное исполнение (International Mounting), а последующие 4 цифры – описание крепления.
- 1-я цифра (индекс) – конструктивное обозначение двигателя. «1» – двигатель на лапках, с подшипниковыми щитами; «2» – то же самое, только с фланцем на одном щите; «3» – то же самое, что и «2», но без лап. См. таблицу выше.
- 2-я, 3-я цифра (индекс) – способ монтажа агрегата.
- 4-я – информация об исполнении вала двигателя. По количеству концов – 1 и 2 соответственно.
Например: IM 3011 – фланцевый на одном подшипниковом щите, валом вниз, значение строго определено.
Важные особенности и отличия типов монтажного крепления электродвигателей
Установка электродвигателя стандартных обозначений (в таблице : № 5, 8, 9) валом вверх или вниз не всегда возможна на практике (особенно это касается моделей типа 1001). Обозначения 1001, 2001, 3001 говорят о том, что агрегат можно устанавливать только в горизонтальном положении! Более универсальные варианты крепления, например, IM1081 – могут быть установлены как первым, так и вторым способом без ограничений.
Отличия электродвигателей по способу крепления:
- Универсальные – легкие, не универсальные – обычно габаритные;
- Если крутящий момент (а также нагрузка) с двигателя передаются на машину, то рекомендуется использовать крепление на лапах – как более надежный и устойчивый способ;
- Малый фланец используется в механизмах небольших размеров, тем не менее, обладающих высокой степенью точности соединения (за счет выступа).
- Комби-двигатели – это работа в направлении для тяжелых агрегатов и промышленности. С помощью комбинированного крепежа достигается надежное соединение элементов внутри системы.
Крепления крановых электродвигателей имеют ряд отличий, это касается исполнения вала электродвигателя:
1001 – на лапах с цилиндрическим валом
1002 – на лапах с двумя цилиндрическими концами вала
2001 – на лапах с фланцем и цилиндрическим валом
2002 – на лапах с фланцем и двумя цилиндрическими концами вала
1003 – на лапах с коническим валом
1004 – на лапах с двумя коническими концами вала
2003 – на лапах с фланцем и коническим валом
2004 – на лапах с фланцем и двумя коническими концами вала
В каждом конкретном случае можно подобрать монтажное крепление подходящее именно для решения вашей задачи. Так же как и агрегат, подходящий по своим параметрам именно Вам. Наши специалисты проконсультируют и помогут с решением любых задач!
Как допустимо расположить электродвигатель при монтаже определяется параметрами электродвигателя — «конструктивное исполнение» и «способ монтажа»
Конструктивное исполнение электродвигателей по способу монтажа определено в ГОСТ 2479-79.
Конструктивное исполнение и способ монтажа электродвигателя оговаривается при заказе и указывается при поставке электродвигателей в сопроводительных документах.
Структура условного обозначения конструктивного исполнения и способа монтажа электродвигателей состоит из латинского названия IM или M и четырех цифр:
- 1-я цифра:конструктивное исполнение :
- 1 — на лапах, с двумя (или одним) подшипниковыми щитами
- 2 — на лапах с двумя подшипниковыми щитами и фланцем на подшипниковом щите (комбинированные)
- 3 — без лап, с фланцем на подшипниковом щите, на рамной подставке
Исполнение IM1081
Исполнение электродвигателя IM1081 — электродвигатель на лапах, с одним концом вала
Исполнение IM1082
Исполнение электродвигателя IM1082 — электродвигатель на лапах, с двумя концами вала
Исполнение IM2081
Исполнение электродвигателя IM2081 — электродвигатель на лапах и с фланцем (комбинированный), фланец доступный с обратной стороны («стандартный» фланец), с одним концом вала
Исполнение IM2181
Исполнение электродвигателя IM2181 — на лапах и с фланцем (комбинированный), фланец недоступный с обратной стороны («малый» фланец), с одним концом вала
Исполнение IM3081
Исполнение электродвигателя IM3081 — без лап, с фланцем, фланец доступный с обратной стороны («стандартный» фланец), с одним концом вала
Исполнение IM3181
Исполнение электродвигателя IM3181 — без лап, с фланцем, фланец недоступный с обратной стороны («малый» фланец), с одним концом вала
Заключение
Можно ли электродвигатель расположить вертикально?
Можно, если в цифровом обозначении направления конца вала (т.е. способа монтажа — 4 цифра условного обозначения) присутствует цифра 8. Это означает, что электродвигатель может работать при любом направлении конца вала.
Все приведенные выше электродвигатели могут работать в любом положении.
Подобрать и купить электродвигатели Вы можете в магазине промышленного оборудования и материалов .
КОНСТРУКТИВНЫЕ ИСПОЛНЕНИЯ ПО СПОСОБУ МОНТАЖА
Монтажное исполнение im1001 могут иметь самые разные электродвигатели:
-общепромышленные асинхронные АИР, А, 5А, 5АИ, АДМ и др.
-крановые электродвигатели МТН, MTF, МТКН, MTKF и др.
-взрывозащищенные двигатели ВА, 4ВР, АИМ и др.
-электродвигатели с повышенным скольжением АИРС, АС, АИРСМ и др.
У импортных электродвигателей, произведенных по стандартам DIN (CENELEK), данное исполнение IM 1001 маркируется по-другому IMB3, но обозначает то же самое — способ крепления на лапах с одним цилиндрическим валом.
Исполнение 1001 не позволяет устанавливать электродвигатель валом вверх или валом вниз, крепить можно только горизонтальным способом. А вот небольшие электродвигатели (как правило, весом до 100кг) выпускаются в исполнении IM1081, что позволяет крепить и эксплуатировать их в любом положении.
Электродвигатели монтажного исполнения IM 1001 широко используются в промышленных агрегатах — насосах, центробежных вентиляторах, дымососах, воздуходувках, конвеерах, прессах, дробилках и т. д. Двигатель IM1001 это стандартная позиция, всегда есть в наличии на складе. >
Виды монтажного исполнения:
IM1001 (IM1081) – лапы IM:B3
IM 2 001 (IM 2 081) – комбинированный (лапы/фланец) IM:B35
IM 3 001 (IM 3 081) – фланец IM:B 5
IM 2 101 (IM 2 181) – комбинированный (лапы/фланец) IM:B34
IM 3 601 (IM 3 681) – фланец IM:B14
IM1011 – лапы IM:V5 валом вниз
IM 2 011 – комбинированный (лапы/фланец) IM:V15 валом вниз
IM 3 011 – фланецевый IM:V1 валом вниз
IM 2 1 1 1 – комбинированный (лапы/фланец) IM:V17 валом вниз
IM 3 6 1 1 – фланец IM:V18 валом вниз
IM10 3 1 – лапы IM:V6 валом вверх
IM 2 0 3 1 – комбинированный (лапы/фланец) IM:V35 валом вверх
IM 3 0 3 1 – фланецевый IM:V3 валом вверх
IM 2 1 3 1 – комбинированный (лапы/фланец) IM:V37 валом вверх
IM 3 6 3 1 – фланец IM:V19 валом вверх
IM10 5 1 (IM10 6 1) – горизонтальное крепление на лапах к вертикальной поверхности
IM10 7 1 – горизонтальное крепление лапами вверх
IM100 2, IM 2 00 2, IM 3 00 2 и т.д. – с двумя концами выходного вала 
Конструктивное исполнение электрическиких машин по способу монтажа (крепление и сочленение) и условное обозначение этих исполнений в технической документации установлены ГОСТ 2479-79.
Условное обозначение состоит из двух букв латинского алфавита IM и четырех цифр: IM Х Х Х Х
Для конструктивных исполнений, предусмотренных ГОСТ 2479-79, но не входящих в СТ СЭВ 246-76 и публикацию МЭК 34-7, установлено условное обозначение одной буквой М и теми же цифрами.
Стандарт устанавливает следующие условные обозначения. Первая цифра — конструктивное исполнение:
1 — на лапах с подшипниковыми щитами;
2 — на лапах с подшипниковыми щитами, с фланцем на подшипниковом щите (или щитах),
3 — без лап с подшипниковыми щитами, с фланцем на одном подшипниковом щите;
4 — без лап с подшипниковыми щитами, с фланцем на станине,
5 — без подшипниковых щитов,
6 — на лапах с подшипниковыми щитами и со стояковыми подшипниками;
7 — на лапах со стояковыми подшипниками (без подшиниковых щитов);
8 — с вертикальным валом, кроме групп от IM1 до IM4,
9 — специального исполнения по способу монтажа.
Вторая и третья цифры — способы монтажа (пространственное положение машины) и направление конца вала, причем в обозначении направления конца вала (3-я цифра) цифра 8 обозначает, что машина может работать при любом из направлений конца вала, определенных цифрами 0-7, а цифра 9 указывает, что направление конца вала машины отлично от определенных цифрами от 0 до 8. В этом случае направление конца вала указывается дополнительно в технической документации.
Четвертая цифра обозначает исполнение конца вала электрической машины:
0 — без конца вала,
1 — с одним цилиндрическим концом вала,
2 — с двумя цилиндрическими концами вала,
3 — с одним коническим концом вала,
4 — с двумя коническими концами вала,
5 — с одним фланцевым концом вала,
6 — с двумя фланцевыми концами вала,
7 — с фланцевым концом вала на стороне D и цилиндрическим концом вала на стороне N, причем под стороной D понимается при одном конце вала для двигателей — приводная, а для генераторов
— приводимая сторона; при двух концах вала — сторона с концом вала большего размера, а при равных диаметрах для машин на лапах с коробкой выводов, расположенных не сверху, — сторона, с которой коробка выводов видна справа,
8 — прочие исполнения конца вала.
Буквенные обозначения установочно-присоединительных и габаритных размеров электрических машин регламентированы ГОСТ 4541-70. Стандартом предписано применять для обозначений строчные буквы латинского и греческого алфавитов с подстрочными индексами:
b — ширина(в направлении, перпендикулярном оси вала);
d — диаметр;
h — высота;
l — длина (в направлении оси вала);
r — радиус;
t — размер в шпоночных соединениях;
а — угловой размер.
Подстрочные индексы к буквенным обозначениям установлены в зависимости от их назначения:
1 — 9 – для валов;
10 — 19 – для размеров лап и фундаментных плит;
20 — 29 – для размеров фланцев ;
30 — 80 – для остальных установочно-присоединительных размеров;
80 и более – для размеров агрегатов и специальных машин.
Для упрощения монтажа электрических машин и агрегатов с горизонтальной осью вращения и непосредственно соединяемых с ними на общем или разных основаниях неэлектрических вращающихся машин (ведомых и ведущих) установлен единый нормализованный ряд высот осей вращения.
Согласно ГОСТ 13267-73 за высоту оси вращения принимают расстояние от оси вращения до опорной плоскости машины. Толщина регулировочных прокладок, применяемых при установке машины, в высоту оси вращения не входит. Дистанционная прокладка входит в высоту оси вращения.
Вводные устройства (коробки выводов) электродвигателей серий АИ и 5А располагаются сверху станины и допускают разворот с фиксацией через 180°.
Конструкция коробок выводов предусматривает возможность подсоединения кабелей с медными и алюминиевыми жилами, с оболочкой из резины или пластика, а также проводов в гибком металлическом рукаве. Ввод осуществляется через один или два штуцера, либо через удлинитель под сухую разделку или эпоксидную заделку кабеля.
Вводные устройства имеют следующие исполнения:
К3 I – с клеммной панелью выводов и одним штуцером;
К3 II – с клеммной панелью выводов и двумя штуцерами;
К3М – с клеммной панелью выводов и удлинителем;
К2 I – без клеммной панели выводов и с одним штуцером;
K2II – без клеммной панели выводов и с двумя штуцерами.